Posting tersebut membincangkan rangkaian pengatur kelajuan enjin elektronik atau litar pengawal menggunakan gelung isyarat maklum balas RPM melalui rangkaian sensor kesan dewan. Idea itu diminta oleh Encik Imsa Naga.
Objektif dan Keperluan Litar
- Terima kasih banyak atas masa anda. Saya yakin litar ini sesuai untuk bekalan fasa tunggal. Alternator saya ialah 3 fasa 7KvA dan saya ingin memasangkannya dengan enjin kenderaan diesel yang mempunyai pemecut sebagai pengganti gabenor kelajuan.
- Apa yang saya ingin laksanakan adalah - 'ELECTRONIC ENGINE SPEED GOVERNOR' yang mungkin mempunyai mekanisme kawalan servo elektronik seperti- Litar Sensor Kelajuan (Sensor RPM Mesin) untuk menggerakkan motor servo untuk menggerakkan mekanisme pemecut untuk mengekalkan kelajuan berterusan enjin berkenaan dengan beban yang dikenakan pada alternator.
- Ini akan membantu mengekalkan frekuensi dan voltan generator. Saya akan dapat menjaga aspek mekanikal, jika anda merancang litar untuk mengawal motor Servo sedemikian rupa sehingga dapat dipusingkan ke kedua arah sehubungan dengan perubahan pada RPM mesin. Terima kasih banyak dalam Antisipasi.
Rajah Litar

CATATAN: MOTOR BOLEH DIGANTI DENGAN SOLENOID 12 V SPRING LOADED
Rekaan
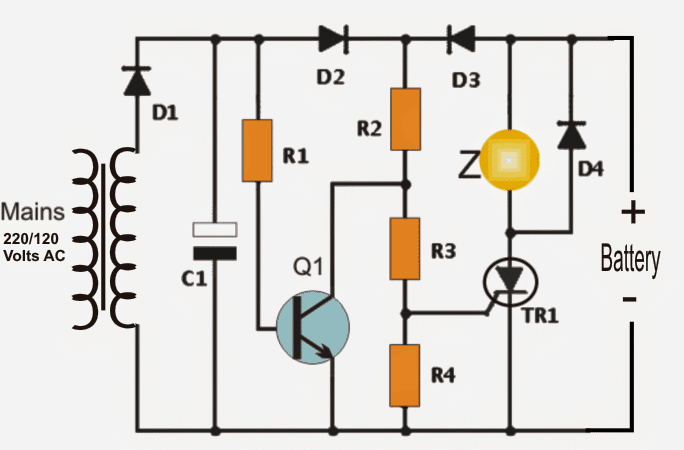
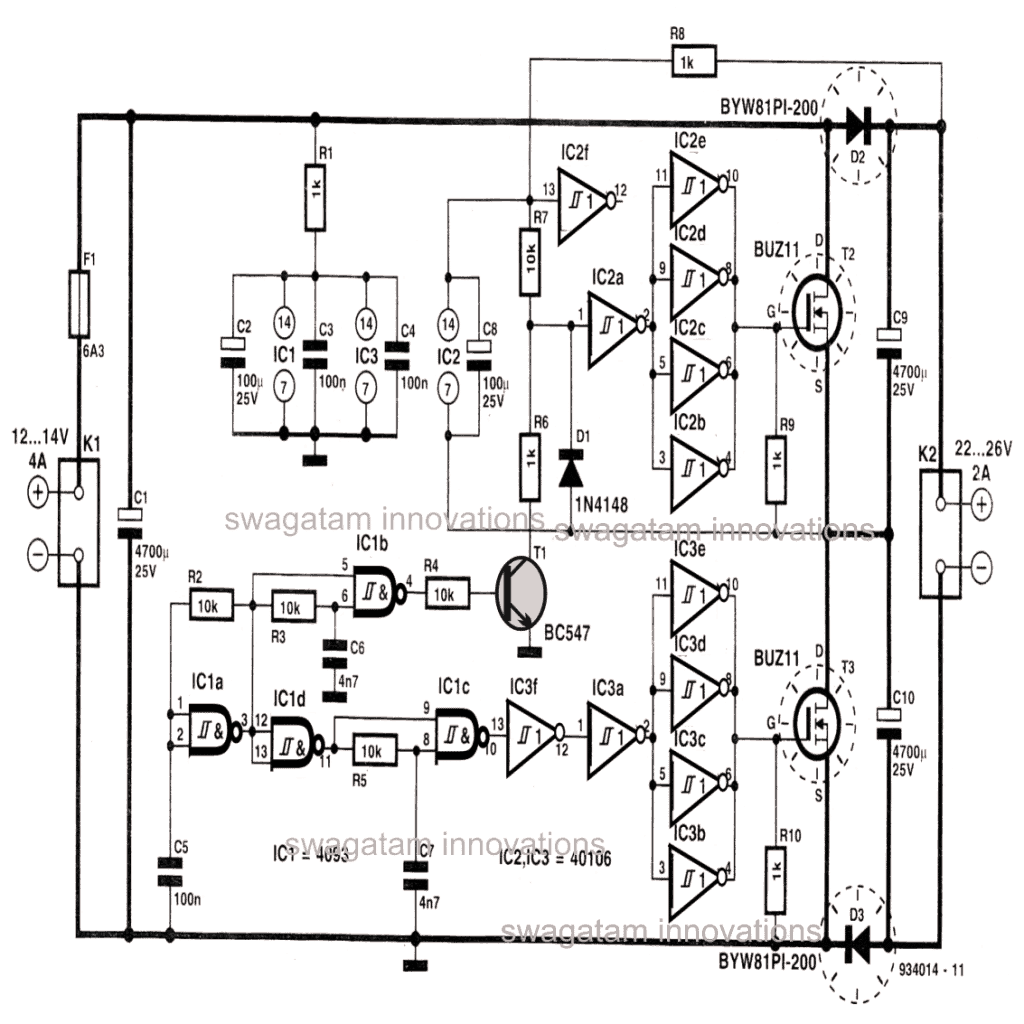
Litar pengawal atau pengawal kelajuan enjin diesel dapat dilihat pada gambar di atas menggunakan pemproses RPM maklum balas atau a litar takometer
Tahap kiri IC1 555 membentuk litar tachometer sederhana yang dikonfigurasi dengan a Sensor kesan dewan terpasang dengan roda beban mesin untuk merasakan kadar RPMnya.
RPM diubah menjadi kadar nadi atau frekuensi yang berbeza-beza dan diterapkan di dasar BJT untuk menukar pin # 2 dari IC1.
Operasi Litar
IC1 pada dasarnya dicabut dalam mod monostable yang menyebabkan outputnya menghasilkan suis ON / OFF yang disesuaikan secara proporsional, yang tempohnya ditetapkan menggunakan periuk 1M yang ditunjukkan.
Output dari IC1 yang membawa kandungan RPM dalam bentuk pulsa timed diperpanjang dengan cukup lancar oleh tahap integrator yang terdiri dari beberapa komponen RC menggunakan resistor 1K, 10K dan 22uF. Kapasitor 2.2uF.
Tahap ini mengubah data RPM kasar monostable menjadi voltan yang berubah-ubah dengan lancar atau berubah secara eksponensial.
Voltan yang berbeza-beza secara eksponen ini dapat dilihat dihubungkan dengan pin # 5 dari tahap IC2 555 seterusnya yang dikonfigurasi sebagai litar astabel.
Fungsi astabel ini adalah untuk menghasilkan output PWM yang sangat sempit atau rendah pada pin # 3 dalam keadaan operasi biasa.
Di sini keadaan operasi normal merujuk kepada keadaan ketika RPM yang dirasakan berada dalam had yang ditentukan dan pin # 5 dari IC2 tidak mendapat input voltan dari pengikut pemancar. Output PWM rendah ini dapat dilaksanakan dengan menyesuaikan dua perintang 100k dan kapasitor 1uF yang berkaitan dengan pin IC2 # 6/2 dan pin # 7.
PWM rendah dari pin # 3 IC2 tidak dapat menukar TIP122 dengan cukup keras dan oleh itu pemasangan roda motor yang ditunjukkan tidak dapat mendapatkan momentum yang diperlukan dan oleh itu tetap dinyahaktifkan.
Namun ketika RPM mulai naik, tachometer mula menghasilkan voltan yang lebih tinggi secara eksponen yang seterusnya menyebabkan voltan meningkat secara proporsional pada pin # 5 IC2.
Ini seterusnya membolehkan TIP122 melakukan lebih keras, dan motor yang disambungkan untuk mendapatkan tork yang mencukupi, sehingga ia mulai menekan pedal pemecut yang terpasang ke arah mod menurun.
Prosedur ini memaksa enjin diesel mengurangkan kelajuannya, yang juga menyebabkan tahap tachometer dan PWM kembali ke keadaan semula, dan menguatkan kelajuan terkawal yang diperlukan untuk motor diesel.
Daripada susunan motor pemecut yang ditunjukkan, pengumpul TIP122 boleh diganti dengan kabel Unit CDI enjin diesel untuk pengurangan kelajuan yang sama, untuk memudahkan keadaan pepejal dan pelaksanaan yang lebih dipercayai mengenai kawalan kelajuan enjin elektronik atau litar pengatur kelajuan enjin elektronik yang dibincangkan.
Cara Menyiapkan
Mula-mula menjaga tahap IC1, IC2 terputus dengan melepaskan pautan pengikut pemancar dengan pin # 5 dari IC2.
Seterusnya pastikan bahawa kedua-dua perintang 100k diubah dan disesuaikan dengan betul sehingga pin # 3 IC2 menghasilkan PWM sesempit mungkin (@ kadar masa kira-kira 5% ON).
Selepas ini, menggunakan a Bekalan kuasa laras 0 hingga 12V , gunakan voltan yang berbeza-beza pada pin # 5 IC2 dan sahkan PWM yang meningkat secara berkadar pada pin # 3.
Setelah bahagian astabel diuji, tachometernya mesti diperiksa dengan menggunakan denyut RPM yang diketahui sesuai dengan RPM had yang diinginkan. Semasa menyesuaikan pemancar pemancar preset dasar BJT sedemikian rupa sehingga pemancarnya dapat menghasilkan sekurang-kurangnya 10V atau tahap yang cukup untuk menyebabkan IC2 PWM menghasilkan tork yang diperlukan pada motor kawalan pedal yang disambungkan.
Setelah melakukan tweak dan percubaan lebih jauh, anda boleh mencapai kawalan kelajuan automatik yang diperlukan untuk enjin dan muatan yang disambungkan dengannya.
KEMASKINI
Sekiranya motor diganti dengan solenoid pegas, maka reka bentuk di atas dapat dipermudah seperti yang diberikan di bawah:

Poros solenoid dapat digabungkan dengan pedal akselerator untuk memenuhi peraturan kecepatan mesin otomatis yang dimaksudkan.
Untuk lebih banyak pilihan mengenai frekuensi ke penukar voltan, anda boleh merujuk ke artikel ini .
Sebelumnya: Litar Aplikasi Gym Fitness Timer terkawal Seterusnya: Mengecas Bateri dengan Litar Piezo Mat