Litar VFD 3 fasa yang dibentangkan ( dirancang oleh saya ) boleh digunakan untuk mengawal kelajuan mana-mana motor AC tiga fasa atau motor AC tanpa berus. Idea itu diminta oleh Encik Tom
Menggunakan VFD
Litar VFD 3 fasa yang dicadangkan dapat diterapkan secara universal untuk kebanyakan motor AC 3 fasa di mana kecekapan peraturan tidak terlalu kritikal.
Ia boleh digunakan secara khusus untuk mengawal kelajuan motor aruhan sangkar tupai dengan mod gelung terbuka, dan mungkin juga dalam mod gelung tertutup yang akan dibincangkan di bahagian seterusnya artikel.
Modul Diperlukan untuk 3 Fasa Inverter
Untuk merancang rangkaian fasa 3 fasa atau pemacu frekuensi berubah yang dicadangkan, peringkat litar asas berikut diperlukan:
- Litar pengawal voltan PWM
- Litar pemacu H-jambatan sisi tinggi / rendah 3 fasa
- Litar penjana 3 fasa
- Litar ke voltan penukar frekuensi untuk menghasilkan parameter V / Hz.
Mari kita pelajari perincian fungsi dari peringkat di atas dengan bantuan penjelasan berikut:
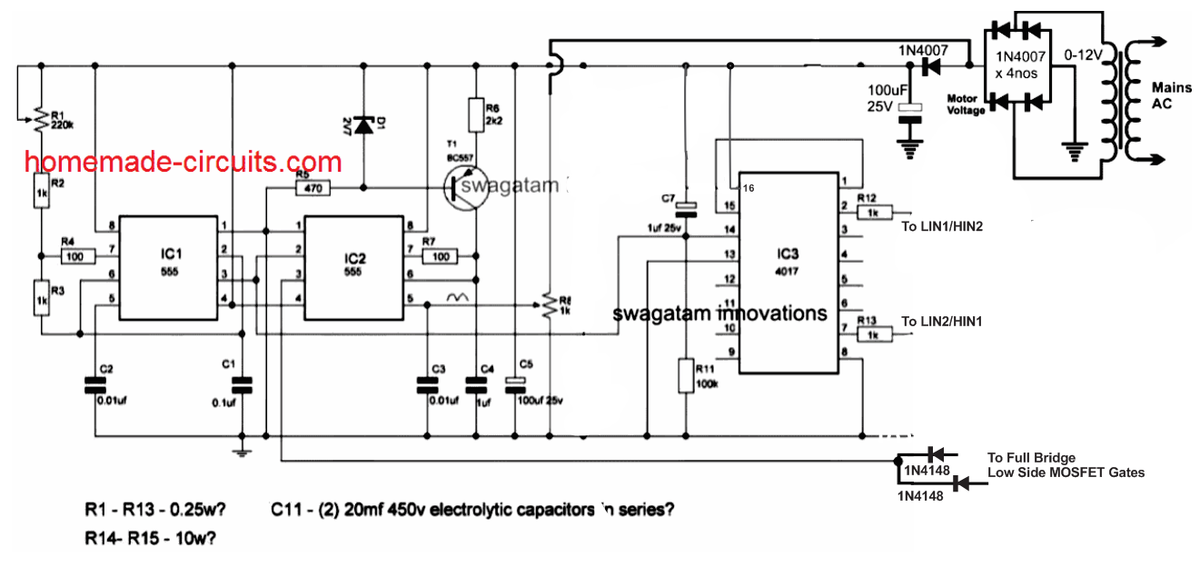
Litar pengawal voltan PWM sederhana dapat dilihat dalam rajah yang diberikan di bawah:

Pengawal PWM
Saya telah menggabungkan dan menjelaskan fungsi tahap penjana PWM di atas yang pada dasarnya dirancang untuk menghasilkan output PWM yang berbeza-beza merentasi pin3 IC2 sebagai tindak balas terhadap potensi yang diterapkan pada pin5 dari IC yang sama.
Pratetap 1K yang ditunjukkan dalam rajah adalah tombol kawalan RMS, yang mungkin disesuaikan dengan tepat untuk memperoleh jumlah voltan keluaran berkadar yang dikehendaki dalam bentuk PWM pada pin3 dari IC2 untuk proses selanjutnya. Ini ditetapkan untuk menghasilkan output yang sepadan yang mungkin bersamaan dengan 220V atau 120V AC RMS.
Litar Pemandu H-Bridge
Gambarajah seterusnya di bawah menunjukkan litar pemacu 3 fasa H-bridge cip tunggal menggunakan IC IRS2330.
Reka bentuknya kelihatan mudah kerana kebanyakan kerumitan dikendalikan oleh litar cip canggih yang dibina.
Isyarat 3 fasa yang dikira dengan baik digunakan di seluruh input HIN1 / 2/3 dan LIN1 / 2/3 IC melalui tahap penjana isyarat 3 fasa.
Hasil daripada IC IRS2330 dapat dilihat disatukan dengan 6 mosfets atau jaringan jambatan IGBT, yang salurannya dikonfigurasi dengan tepat dengan motor yang perlu dikendalikan.
Pintu mosfet sisi rendah / IGBT disatukan dengan pin IC2 # 3 dari peringkat litar penjana PWM yang dibincangkan di atas untuk memulakan suntikan PWM ke tahap mosfet jambatan. Peraturan ini akhirnya membantu motor memperoleh kelajuan yang diinginkan seperti yang ditetapkan (melalui pratetap 1 k pada rajah pertama).

Dalam rajah berikut, kita menggambarkan rangkaian penjana isyarat 3 fasa yang diperlukan.

Mengkonfigurasi Litar Penjana 3 Fasa
Penjana 3 fasa dibina di sekitar beberapa cip CMOS CD4035 dan CD4009 yang menghasilkan isyarat 3 fasa dimensi dengan tepat di pinout yang ditunjukkan.
Kekerapan isyarat 3 fasa bergantung pada jam input yang diberi yang seharusnya 6 kali ganda daripada isyarat 3 fasa yang dimaksudkan. Maksudnya, jika frekuensi 3 fasa yang diperlukan adalah 50 Hz, jam input hendaklah 50 x 6 = 300 Hz.
Ini juga menyiratkan bahawa jam di atas dapat diubah untuk mengubah frekuensi efektif IC pemandu yang pada gilirannya akan bertanggungjawab mengubah frekuensi operasi motor.
Tetapi kerana perubahan frekuensi di atas perlu dilakukan secara automatik sebagai tindak balas terhadap voltan yang berbeza-beza, penukar voltan ke frekuensi menjadi penting. Peringkat seterusnya membincangkan litar penukar voltan ke frekuensi tepat yang tepat untuk pelaksanaan yang diperlukan.
Cara Membuat Nisbah V / F Tetap
Biasanya pada motor induksi, untuk mengekalkan kecekapan optimum pada kelajuan dan tork motor, kelajuan slip atau kelajuan pemutar perlu dikendalikan yang seterusnya menjadi mungkin dengan mengekalkan nisbah V / Hz yang tetap. Oleh kerana fluks magnet stator selalu malar tanpa mengira frekuensi bekalan input, kelajuan pemutar mudah dikawal oleh mengekalkan nisbah V / Hz tetap .
Dalam mod gelung terbuka, ini dapat dilakukan secara kasar dengan menjaga nisbah V / Hz yang telah ditentukan, dan menerapkannya secara manual. Contohnya dalam rajah pertama ini mungkin dilakukan dengan menyesuaikan pratetap R1 dan 1K. R1 menentukan frekuensi dan 1K menyesuaikan RMS output, oleh itu dengan menyesuaikan dua parameter dengan tepat, kita dapat menegakkan jumlah yang diperlukan V / Hz secara manual.
Namun untuk mendapatkan kawalan tork dan kelajuan motor induksi yang relatif tepat, kita harus menerapkan strategi gelung tertutup, di mana data kelajuan slip perlu dimasukkan ke litar pemprosesan untuk penyesuaian automatik nisbah V / Hz sehingga ini nilai sentiasa hampir hampir dengan pemalar.
Melaksanakan Maklum Balas Tertutup
Gambar rajah pertama di halaman ini dapat diubah suai dengan tepat untuk merancang peraturan V / Hz automatik gelung tertutup seperti yang ditunjukkan di bawah:

Dalam rajah di atas, potensi pada pin # 5 IC2 menentukan lebar SPWM yang dihasilkan pada pin # 3 dari IC yang sama. SPWM dihasilkan dengan membandingkan sampel riak 12V utama pada pin # 5 dengan gelombang segitiga di pin # 7 IC2, dan ini disuapkan ke mosfet sisi rendah untuk kawalan motor.
Pada mulanya SPWM ini ditetapkan pada beberapa tahap yang disesuaikan (menggunakan perset 1K) yang memicu gerbang IGBT sisi rendah pada jambatan 3-fasa untuk memulakan pergerakan pemutar pada tahap kelajuan nominal yang ditentukan.
Sebaik sahaja rotor rotor mula berputar, tachometer yang terpasang dengan mekanisme rotor menyebabkan jumlah voltan tambahan berkadar pada pin # 5 IC2, ini secara proporsional menyebabkan SPWM semakin lebar menyebabkan lebih banyak voltan pada gegelung stator motor. Ini menyebabkan peningkatan kelajuan rotor seterusnya menyebabkan lebih banyak voltan pada pin # 5 IC2, dan ini berterusan sehingga voltan setara SPWM tidak lagi dapat meningkat dan penyegerakan rotor stator mencapai keadaan stabil.
Prosedur di atas berlaku penyesuaian diri sepanjang tempoh operasi motor.
Cara Membuat dan Mengintegrasikan Tachometer
Reka bentuk tachometer sederhana dapat dilihat pada rajah berikut, ini dapat disatukan dengan mekanisme rotor sehingga frekuensi putaran dapat memberi makan dasar BC547.

Di sini data kelajuan rotor dikumpulkan dari sensor kesan hall atau rangkaian LED LED / Sensor dan dimasukkan ke pangkal T1.
T1 berayun pada frekuensi ini dan mengaktifkan litar tachometer yang dibuat dengan mengkonfigurasi litar monostable IC 555 dengan tepat.
Output dari tachometer di atas berbeza secara berkadar sebagai tindak balas terhadap frekuensi input di dasar T1.
Apabila frekuensi meningkat voltan di sebelah kanan ekstrem output D3 juga meningkat dan sebaliknya, dan membantu mengekalkan nisbah V / Hz ke tahap yang agak tetap.
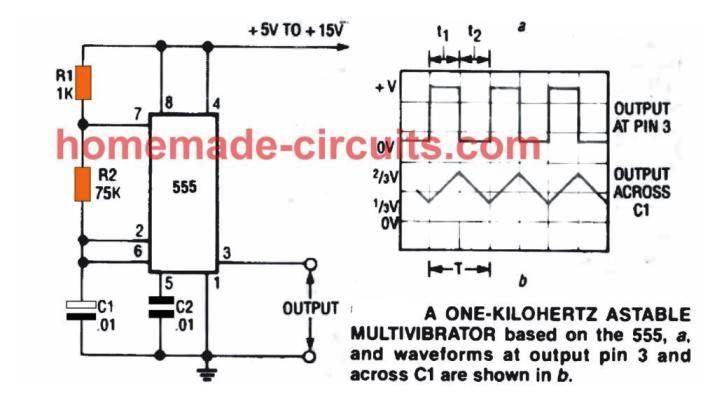
Cara Mengawal Kelajuan
Kelajuan motor menggunakan V / F malar dapat dicapai dengan mengubah input frekuensi pada input jam IC 4035. Ini dapat dicapai dengan memberi makan frekuensi berubah dari litar astabel IC 555 atau litar astabel standard ke input jam IC 4035.
Mengubah frekuensi secara efektif mengubah frekuensi operasi motor yang dengan itu menurunkan kelajuan slip.
Ini dikesan oleh tachometer, dan tachometer secara proporsional mengurangkan potensi pada pin # 5 IC2 yang seterusnya mengurangkan kandungan SPWM pada motor, dan akibatnya voltan untuk motor dikurangkan, memastikan variasi kelajuan motor dengan betul nisbah V / F yang diperlukan.
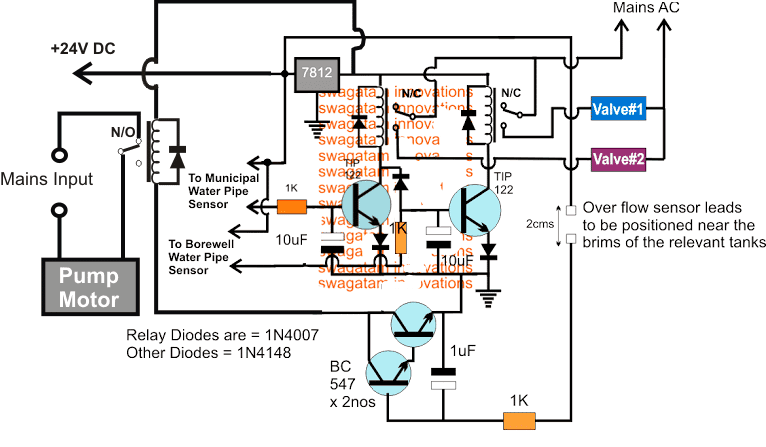
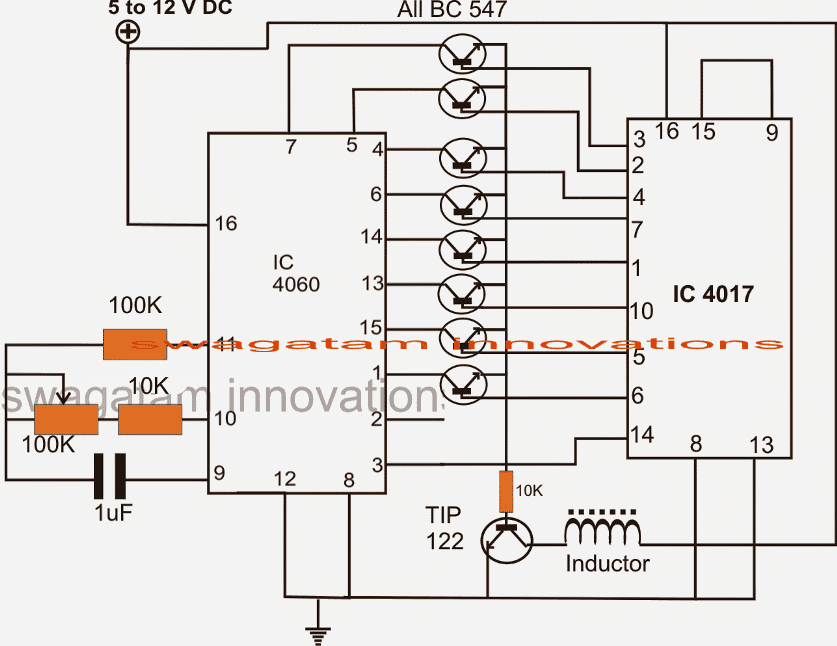
Penukar V ke F Buatan Sendiri

Dalam litar penukar voltan ke frekuensi di atas digunakan IC 4060 dan rintangan bergantung pada frekuensi dipengaruhi melalui pemasangan LED / LDR untuk penukaran yang dimaksudkan.
Pemasangan LED / LDR dilekatkan di dalam kotak kalis cahaya, dan LDR diposisikan melintasi perintang IC yang bergantung pada frekuensi.
Oleh kerana tindak balas LDR / LDR agak linier, pencahayaan LED yang berbeza-beza pada LDR menghasilkan frekuensi yang berbeza (meningkat atau menurun) merentasi pin3 IC.
Rentang tahap FSD atau V / Hz dapat diatur dengan mengatur perintang 1M dengan tepat atau bahkan nilai C1.
LED adalah voltan diturunkan dan diterangi melalui PWM dari tahap litar PWM pertama. Ini menyiratkan bahawa sebagai PWM bervariasi, pencahayaan LED juga akan bervariasi yang pada gilirannya akan menimbulkan peningkatan atau penurunan frekuensi secara proporsional pada pin3 IC 4060 pada rajah di atas.
Mengintegrasikan Penukar dengan VFD
Kekerapan yang berbeza-beza dari IC 4060 sekarang hanya perlu disatukan dengan input jam penjana 3 fasa IC CD4035.
Tahap di atas membentuk bahan utama untuk membuat litar VFD 3 fasa.
Sekarang, adalah penting untuk membincangkan mengenai DC BUS yang diperlukan untuk membekalkan pengendali motor IGBT dan prosedur penyediaan untuk keseluruhan reka bentuk.
DC BUS yang digunakan melintasi rel IGBT H-bridge mungkin diperoleh dengan membetulkan input utama 3 fasa yang tersedia menggunakan konfigurasi litar berikut. Rel IGBT DC BUS disambungkan di titik yang ditunjukkan sebagai 'beban'

Untuk sumber fasa tunggal, pembetulan boleh dilaksanakan dengan menggunakan konfigurasi rangkaian jambatan 4 dioda standard.
Cara Menyiapkan litar VFD 3 fasa yang dicadangkan
Ini boleh dilakukan mengikut arahan berikut:
Setelah menggunakan voltan bas DC di seluruh IGBT (tanpa motor disambungkan) atur pratetap PWM 1k sehingga voltan melintasi rel menjadi sama dengan spesifikasi voltan motor yang dimaksudkan.
Seterusnya sesuaikan preset IC 4060 1M untuk menyesuaikan input IC IRS2330 ke tingkat frekuensi yang betul yang diperlukan mengikut spesifikasi motor yang diberikan.
Setelah prosedur di atas selesai, motor yang ditentukan dapat disambungkan dan dibekalkan dengan tahap voltan yang berbeza, parameter V / Hz dan disahkan untuk operasi V / Hz automatik di atas motor yang disambungkan.
Sebelumnya: Cara Membangunkan Litar Cahaya Tumbuh Seterusnya: Litar Pelembut Air Terokai