Dengan perkembangan teknologi terutamanya dalam teknologi robotik, robot dominan dalam banyak aplikasi. Sebahagian daripadanya adalah kawasan yang sangat berisiko dan berbahaya. Aplikasi tentera dan medan perang kini meningkatkan penggunaan robot mereka dalam beberapa tugas penting dan rumit. Dalam salah satu artikel saya, saya telah menggambarkan penggunaan Robot sebagai perisik dalam operasi ketenteraan. Sekarang, bagaimana jika ada keperluan untuk pembelaan kenderaan robotik atau serangan oleh robot? Di situlah datangnya keperluan untuk robot yang disertakan dengan mekanisme serangan. Salah satu contohnya ialah kenderaan robot dengan pistol LASER.

Kenderaan Robotik RF Terkawal dengan susunan pancaran laser
Robot semacam itu digunakan pada dasarnya dalam operasi ketenteraan dan juga oleh polis trafik untuk mengesan kelajuan kenderaan yang bergerak.
Sebelum pergi ke perincian mengenai Robot dengan senjata Laser, mari kita memahami dengan cepat mengenai LASER sebagai senjata.
Rasuk LASER (Light Amplification by Stimulation Emission) adalah cahaya uni-directional yang sangat fokus tidak seperti lampu dari mentol sederhana. Ini terdiri dari palung dan puncak yang disegerakkan, iaitu ombak tidak saling mengganggu. Ini menghasilkan cahaya yang sangat fokus dengan daya yang sangat tinggi iaitu 1000 hingga 1 juta kali lebih besar daripada lampu mentol biasa. Ini adalah alat yang mengawal pelepasan dan penyerapan foton dengan mengepam jumlah tenaga yang mencukupi. Dalam ini, sumber foton diperkuat menjadi pancaran cahaya. Panjang gelombang laser ini bervariasi menjadi spektrum yang berbeza seperti terlihat, inframerah, dan ultraviolet.
Prinsip di sebalik LASER berkisar pada tiga perkara iaitu penyerapan, pelepasan spontan, dan pelepasan terangsang. Jumlah tenaga yang mencukupi dari foton berinteraksi dengan atom, menyebabkan atom melompat dari keadaan tenaga yang lebih rendah ke keadaan tenaga yang lebih tinggi. Atom ini kembali ke keadaan tenaga yang lebih rendah dengan memancarkan foton yang disebut pancaran spontan. Dalam pancaran terangsang adalah pembebasan tenaga dari atom dengan cara buatan. jadi foton berinteraksi dengan atom teruja, mempunyai tenaga dan polarisasi yang sama dengan foton kejadian.
Sekarang mari kita lihat Bahagian Perkakasan Robot
- Pangkalan: Pangkalan robot sedemikian boleh berupa badan kubik dengan roda yang terpasang untuk pergerakannya.
- Motor DC: Robot terdiri daripada dua motor DC yang digerakkan oleh pemandu motor dan memberikan pergerakan yang diperlukan kepada robot.
- Unit Kawalan: Pergerakan robot dikendalikan menggunakan modul komunikasi RF. Pemancar terdiri daripada tombol tekan, mikrokontroler, penyahkod, dan pemancar RF sedangkan unit penerima yang tertanam pada robot terdiri daripada pengekod dan modul penerima RF untuk mengawal gerakan robotik .
- Pistol LASER: Pistol LASER dipasang pada robot yang melakukan tugas utama robot.
Mengintip Robot Berfungsi
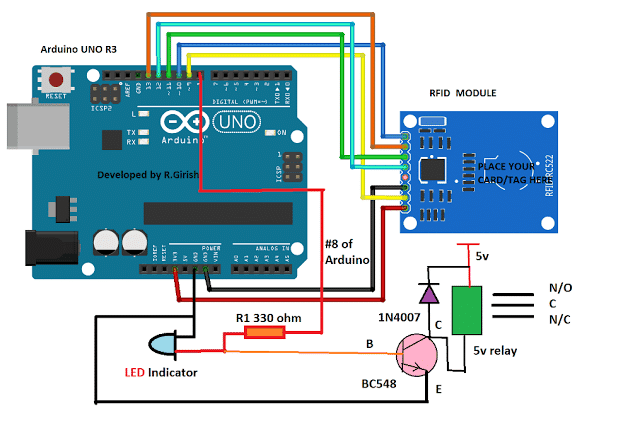
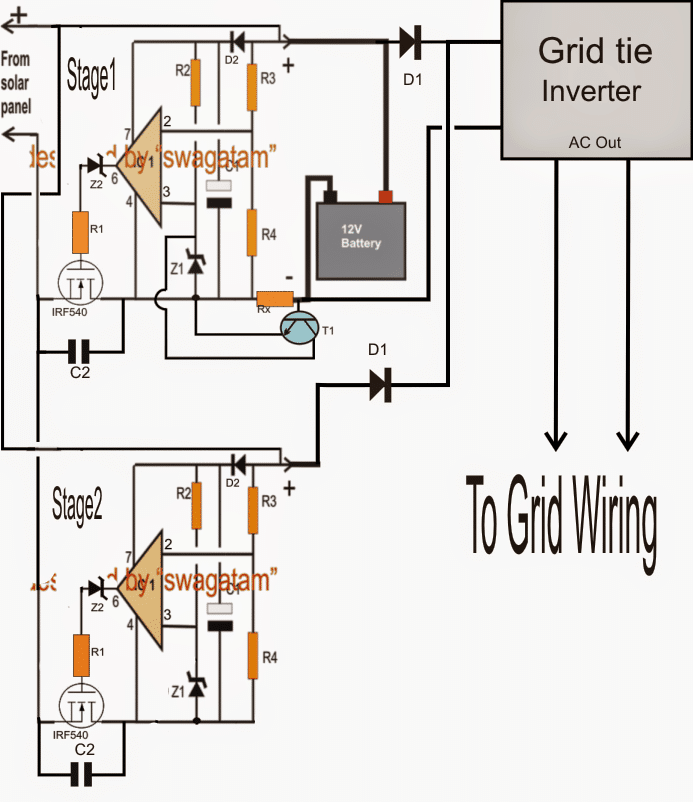
Robot ketika bergerak ke arah yang diperlukan menembak pancaran cahaya yang kuat dari pistol LASER yang boleh membahayakan sasaran atau hanya menghasilkan tempat untuk mengesan sasaran. LASER perlu didorong oleh beberapa sumber tenaga. Dalam reka bentuk prototaip sederhana menggunakan pen LASER asas, peranti ini didorong oleh transistor yang bertindak sebagai suis. Transistor menerima isyarat logik rendah dari mikrokontroler dan dalam keadaan mati, menjadikan modul LASER disambungkan terus ke bekalan kuasa 5 V.

Laser Gun Didorong oleh Transistor Bekerja sebagai Penyongsang
Mengawal Robot
Untuk mengawal pergerakan robot, pengoperasian motor perlu dikawal. Ini dapat dilakukan dengan menggunakan operasi pengendali motor yang dikendalikan oleh RF. Perintah dihantar menggunakan pemancar RF pada beberapa jarak jarak sekitar 200 meter dan diterima oleh penerima RF untuk menggerakkan motor.
Unit pemancar terdiri dari beberapa butang tekan yang bertindak sebagai suis arahan untuk menggerakkan robot ke arah mana yang diinginkan. Tombol tekan dihubungkan dengan mikrokontroler, yang diprogram untuk mengirim data dalam bentuk selari berdasarkan input butang tekan, ke pengekod. Pengekod menukar data selari ini ke bentuk siri dan data bersiri ini dihantar menggunakan modul pemancar RF melalui antena.

Blok Diagram Menunjukkan Bahagian Pemancar
Unit penerima terdiri daripada modul penerima RF yang menerima isyarat termodulasi dan mendemodulasinya. Penyahkod menerima isyarat demodulasi dalam bentuk bersiri dan menukarnya menjadi bentuk selari. Pengawal mikro menerima isyarat dan mengawal pemandu motor dengan sewajarnya. Pemacu motor yang digunakan dalam LM293D yang dapat mengawal 2 motor pada satu masa.

Blok Diagram menunjukkan Bahagian Penerima
Oleh itu dengan menggunakan komunikasi RF kita dapat mengawal robot.
Dalam keterangan di atas, saya telah memberikan idea ringkas mengenai prototaip ringkas Robot Vehicle dengan sinar LASER. Dalam aplikasi kehidupan sebenar, biasanya sistem komunikasi jarak jauh seperti GSM atau DTMF digunakan untuk mengendalikan robot dari tempat terpencil.
3 Aplikasi Kenderaan Robotik dengan Laser Gun:
- Pengesanan Sasaran : Kenderaan robot boleh menggunakan sinar LASER sehingga menyebabkan titik pada sasaran, sehingga mudah dilihat dan dapat disasarkan. Contohnya ialah Air Borne LASER.
- Pemusnahan Sasaran : Yang kuat Rasuk LASER dari urutan frekuensi 95GHz boleh menyebabkan sensasi terbakar pada tubuh manusia kerana menembusi kulit sebanyak 1/64ikasatu inci dan tenaga pancaran dapat memanaskan molekul air di dalam badan. Contohnya ialah Sistem Penolakan Aktif yang dibangunkan oleh Amerika Syarikat.
- Pencari Julat Sasaran dan pengesanan kelajuan : Rasuk LASER dari kenderaan robot dapat digunakan untuk mencari jarak sasaran dengan prinsip pantulan cahaya LASER dan juga kecepatan sasaran dapat dihitung setelah kita dapat memperoleh jarak.
Jadi sekarang kita mempunyai idea ringkas mengenai Robot menggunakan alat pengesan sasaran dan pemusnah. Adakah ia ada gunanya untuk orang awam selain hanya tentera? Fikir dan jawab.