Artikel ini membincangkan rangkaian kawalan jauh inframerah (IR) sederhana yang dikonfigurasikan untuk mengoperasikan motor DC sebagai tindak balas terhadap pengalihan yang dibuat dari telefon bimbit jauh IR standard seperti alat kawalan jauh TV atau alat kawalan jauh DVD.
Motor yang disambungkan boleh digerakkan sama ada dan juga boleh dihentikan.
Litar dapat difahami dengan penjelasan berikut:
Bagaimana ia berfungsi
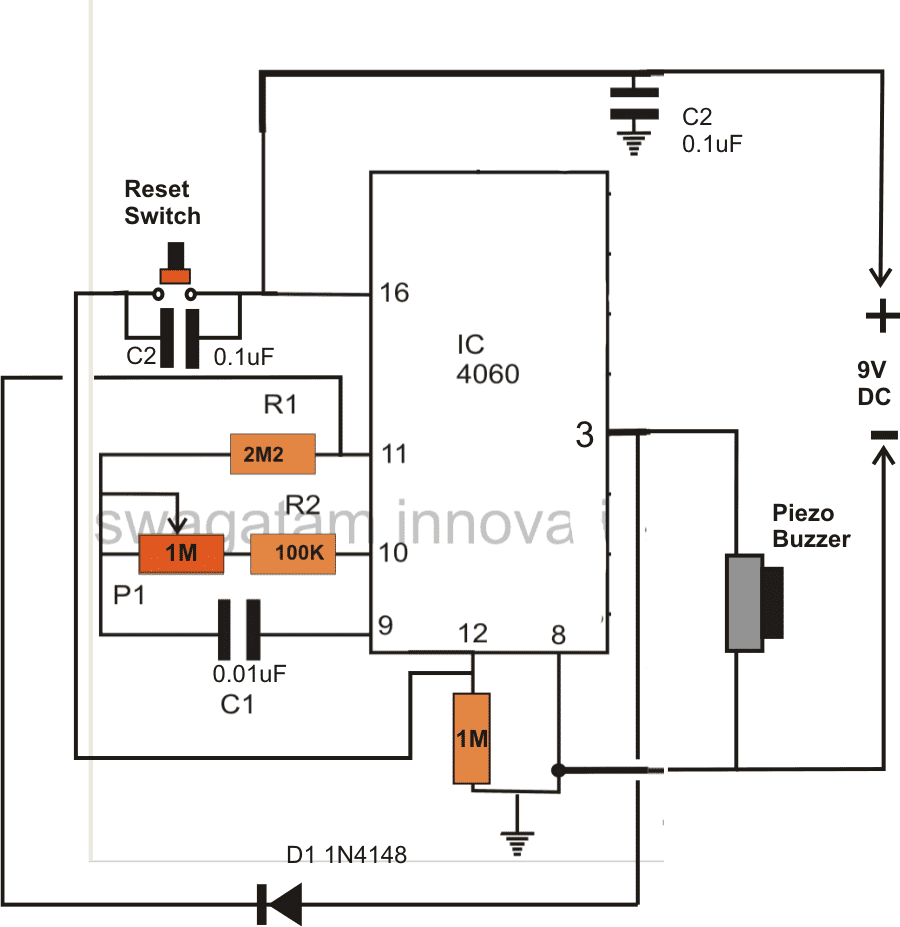
Seperti yang dapat dilihat pada gambarajah litar yang diberikan, sensor adalah modul sensor IR tiga pin standard yang biasanya akan bertindak balas terhadap mana-mana telefon bimbit jauh TV IR.
Apabila sinar IR (inframerah) difokuskan pada sensor, pin yang ditetapkan sebagai output menjadi rendah logik. Keadaan ini berterusan selagi pancaran tetap fokus padanya.
Transistor T1 yang merupakan PNP bertindak balas terhadap isyarat rendah logik ini dan melakukan pertukaran geganti yang dilampirkan RL1.
Kenalan secara langsung menghubungkan potensi positif seketika pada pemungut transistor ke pin # 14 IC1 yang disambungkan sebagai litar flip flop.
Dengan andaian urutan logik awal berada pada pin # 3 IC, pencetus di atas mengalihkan urutan ke pin # 2 IC, menjadikannya tinggi.
Ini menghidupkan T2 dan relay RL2 yang sepadan.
RL2 menjalankan dan menghubungkan wayar motor tertentu ke bekalan negatif. Oleh kerana terminal motor yang lain mendapat positif dari RL3, ia mula bergerak pada arah yang ditetapkan.
Sekarang anggap, sensor diberikan pemicu berikutnya melalui telefon bimbit IR, proses di atas berulang dan urutan output beralih dari pin # 2 ke pin # 4 dari IC1, yang langsung menghidupkan ON T3 sambil mematikan T2.
Tindakan di atas membalikkan sambungan relay memaksa motor untuk segera memutar arah putarannya.
Dengan pencetus seterusnya dari telefon bimbit jauh, urutan melantun kembali ke pin # 3, yang tidak disambungkan ke apa-apa dan mengakibatkan pemadaman motor sepenuhnya.
Kemasukan L1, C1 memastikan bahawa litar tidak terpengaruh dengan pemicu palsu sensor.
L1 dapat dieksperimen untuk mendapatkan nilai yang optimum sehingga ia hanya 'mendasarkan' isyarat luaran sesat yang tidak disengajakan dan bukan isyarat IR sebenar dari telefon bimbit kawalan jauh.


Senarai Bahagian untuk litar motor kawalan jauh IR (infra merah) di atas.
R1 = 100 ohm,
R2 = 1K
R3, R4, R5, R6, R7 = 10K
C1, C4, C6 = 100uF / 25V
C2, C3, C7 = 0.22uF
C5 = 1000uF / 25V
C6 = 0.22uF
L1 = tercekik 100mH
T1 = BC557
T2, T3 = BC547
D1 --- D7 = 1N4007
IC1 = IC4017
IC2 = 7812
Semua geganti = 12V / 400 ohm / SPDT
sensor = TSOP1738
Motor = motor 12V Dc
Sebelumnya: Menggunakan Nistor Thermistor sebagai Surge Suppressor Seterusnya: MJE13005 Litar Bekalan Kuasa 220V Kompak