Dalam catatan ini kita menyiasat apa itu motor BLDC dan seterusnya kita belajar mengenai reka bentuk litar pemandu motor BLDC tanpa sensor.
Peminat CPU BLDC
Terlihat kipas yang bergerak pantas dalam CPU, penstabil voltan, pemain DVD, dan peralatan lain yang serupa, yang berfungsi dengan kecekapan maksimum, memakan ruang minimum, semasa dan masih mampu menyampaikan operasi penting seperti yang ditetapkan untuk peralatan tertentu?
Ya, ini semua versi moden peminat BLDC atau motor DC tanpa berus yang jauh lebih unggul daripada motor tradisional yang disikat lama.

Gambar ihsan: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Walau bagaimanapun, motor BLDC akan memerlukan litar pemacu yang canggih, dan ya semua kipas CPU ini mengandungi modul pemacu ini di dalamnya, walaupun ini kelihatan mudah dikendalikan menggunakan DC biasa, secara dalaman sistem ini sudah dilengkapi dengan litar pintar.
Pemandu Motor BLDC
Di sini kita akan belajar mengenai satu litar pemacu motor BLDC pintar seperti itu, menggunakan cip tunggal DRV10963 untuk menggerakkan mana-mana motor BLDC kecil dengan kecekapan yang luar biasa, dan kemudian di salah satu artikel yang akan datang kita akan melihat bagaimana litar IC ini dapat ditingkatkan untuk memandu walaupun BLDC semasa yang kuat seperti yang ada digunakan dalam quadcopters.
Tetapi sebelum ini akan menarik untuk mempelajari sedikit mengenai motor BLDC.
Perbezaan Antara Motor DC Berus dan Tanpa Brush
Perbezaan antara motor berus dan motor tanpa berus dan kadar kecekapan agak jelas.
Oleh kerana motor yang disikat mempunyai angker luka itu sendiri bergerak di antara magnet, harus menggunakan 'sikat' (menggosok kenalan) sehingga terminal gegelung bergerak dapat menerima voltan bekalan secara konsisten tanpa harus sampai ke sumber bekalan sendiri, yang sebaliknya akan membuat bekerja tidak mungkin dan menjejaskan operasi.
Dalam motor tanpa berus, gegelung atau belitan tidak pernah bergerak dan tetap, di sini rotor membawa sekumpulan magnet kekal dan berputar dalam pengaruh fluks magnet penggulungan sekitarnya.
Oleh kerana magnet bebas dari semua kerumitan, dan dapat berfungsi tanpa melibatkan terminal untuk mengurus atau menerima kuasa, ia dapat bergerak dengan mudah, berputar pada kelajuan yang cepat dan hampir pada tahap yang tidak bersuara.
Tetapi ada tangkapan di sini. Untuk membuat elektromagnet bertindak balas terhadap fluks magnet kekal, perlu ada peralihan fasa magnetik atau kutub yang tetap, sehingga kedua-dua rakan dapat terus bertindak balas dan melalui daya lawan sehingga melepaskan daya kilasan yang diperlukan ke atas rotor dan laksanakan putaran dengan daya kilas yang terhasil.
Dalam motor yang disikat, ini menjadi lebih mudah kerana sifat penyesuaian diri dari gegelung angker yang mampu berputar dan membuat daya magnet lawan yang bertahan sendiri dan terus berputar tanpa memerlukan pulsa atau pemprosesan luaran.
Namun dalam BLDC ini menjadi masalah kerana pemutar magnet tetap 'tidak mengerti' dan memerlukan arahan magnetik yang dikira dari penggulungan agar dapat berputar dengan cara yang bermakna dan tidak secara sembarangan.
Itulah sebabnya mengapa semua motor BLDC mewajibkan litar pemandu motor untuk memerintah tiga set penggulungan yang berbeza di dalam motor.
Oleh itu, semua BLDC pada dasarnya adalah motor 3-fasa dan secara wajib memerlukan 3 fasa untuk menghasilkan tork putaran pada pemutar.
Apa yang dilakukan oleh Pemacu BLDC Sensorless
Litar pemacu BLDC yang kurang sensor hanya menggerakkan 3 set penggulungan secara berurutan sehingga pemutar magnet dapat melalui daya lawan yang konsisten yang membolehkan motor mencapai daya kilas dan daya putaran yang berterusan.
Tetapi daya berurutan penggulungan BLDC oleh litar tidak dapat diatur secara rawak, ia harus bersamaan atau sebagai tindak balas terhadap kedudukan putaran magnet pemutar, jika tidak, pelaksanaannya dapat menjadi haywire dan kita mungkin menyaksikan poros motor (rotor ) berpusing secara tidak sengaja, yang tersentak di antara arah jam dan berlawanan arah jam tanpa putaran yang masuk akal.
Mengapa Sensor Digunakan dalam BLDC Motors
Oleh itu, kami memperkenalkan sensor yang berada di dalam banyak varian motor BLDC, sensor ini (biasanya sensor kesan Hall) 'memahami' perubahan kedudukan kutub magnet magnet pemutar, mengarahkan litar pemproses terpasang untuk menggerakkan belitan yang sesuai dan melakukan pergerakan putaran dengan tork yang optimum.
Sensor kesan Hall digunakan dengan berkesan pada kebanyakan motor BLDC yang saiznya lebih besar, tetapi untuk motor yang lebih kecil seperti pada kipas CPU, pemacu CPU, pemain DVD, pada kipas ekzos kecil, untuk motor yang digunakan dalam quadcopters, sensor kesan ruang boleh menjadi tidak sesuai dan oleh itu pendekatan alternatif sensor kurang dilaksanakan.
Ini melibatkan eksploitasi elektrik EMF belakang penggulungan yang diambil sebagai sumber rujukan untuk memproses dan menggerakkan set penggulungan yang berkaitan dan melaksanakan tork putaran.

Mensimulasikan Pergerakan Rotor BLDC
Dalam simulasi minyak mentah di atas, kita dapat memvisualisasikan bagaimana EMF belakang yang dilepaskan diambil sebagai rujukan dan digunakan untuk menghasilkan denyutan urutan untuk set penggulungan berikutnya, memaksakan tork berputar pada pemutar magnet kekal pusat. Simulasi mungkin bukan replikasi yang tepat, namun ia memberikan idea kasar mengenai prinsip kerja.
Sangat menarik untuk diperhatikan bahawa nadi dihidupkan ketika N / S magnet berada tepat di tengah-tengah teras penggulungan, yang membolehkan belitan dapat bertenaga sebagai N atau S bergantung pada polaritas nadi dan menghasilkan daya tarikan dan penolakan daya pada magnet N / S, sehingga menghasilkan daya kilas yang diperlukan pada tahap maksimum.
Dan ini seterusnya menjadi mungkin kerana EMF belakang dilepaskan melalui pertukaran penggulungan sebelumnya.
Perbincangan di atas menjelaskan cara kerja motor yang kurang sensor BLDC, sekarang mari kita pelajari bagaimana litar tertentu menangani pelaksanaan kompleks pengalihan 3 fasa di atas
Pemandu BLDC DRV10963
Selepas beberapa Googling, saya dapati litar pemacu BLDC tanpa sensor ini menggunakan cip tunggal DRV10963 yang menggunakan banyak bahagian dalam konfigurasi namun dapat melaksanakan pemprosesan yang canggih untuk tindakan yang dimaksudkan.
DRV10963 adalah cip canggih yang direka khusus untuk mengoperasikan sensor BLDC kurang sensor dengan hanya menjangkakan EMF belakang dari belitan motor dan memberikan arahan tepat pada penggulungan dan mencapai tork putaran optimum di atas pemutar.
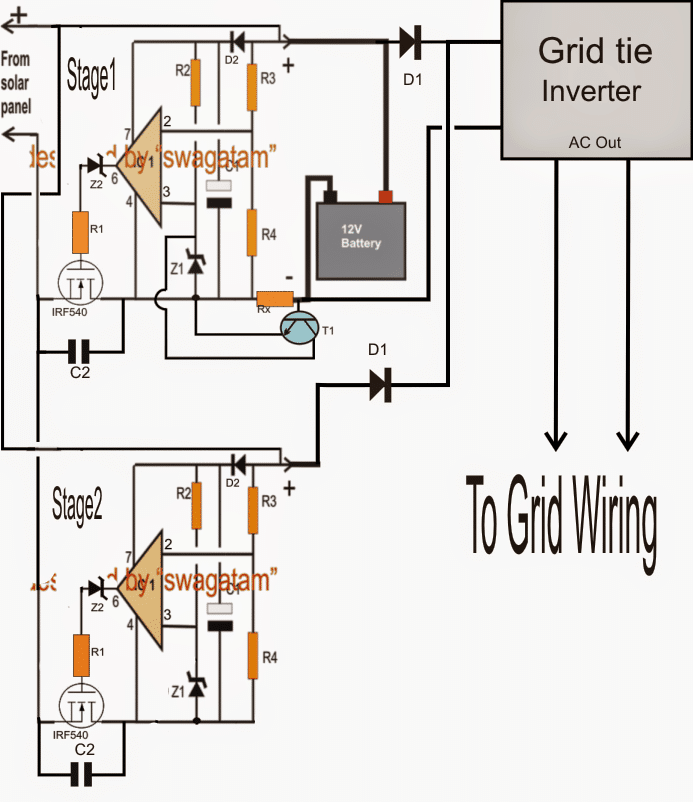
Rajah Litar

Gambar di atas menunjukkan susun atur litar yang ringkas yang nampaknya tidak termasuk IC.
Berbagai pinout dialokasikan untuk menjalankan fungsi yang ditentukan seperti kawalan kecepatan motor PWM, kawalan arah, dan lain-lain dengan hanya memasukkan pinout yang relevan dengan data yang ditentukan dari sumber luaran.
Gambar berikut menunjukkan paket cip, yang kelihatan seperti DIL IC 10 pin, pelbagai fungsi pinout yang sama dapat dikaji dari data seperti yang ditunjukkan di bawah rajah:

Merujuk gambarajah litar pemacu BLDC tanpa sensor yang dicadangkan seperti yang ditunjukkan dalam artikel sebelumnya dan juga gambar cip di atas, perincian pinouts dapat difahami seperti berikut:
Maklumat Pinout IC
FG = Ini adalah pin penunjuk kelajuan motor (output), yang dipasang dalam mod pemungut terbuka dengan BJT dalaman.
Pengumpul terbuka menandakan bahawa output pada pinout ini akan menghasilkan PWM negatif melalui logik tenggelam di seluruh pemungut terbuka dan tanah, sehingga untuk mendapatkan bacaan yang sah, pengguna perlu menyambungkan perintang penarik ke seluruh pengumpul terbuka ini dan bekalan positif (5V ) untuk mencapai petunjuk kelajuan pada pinout ini.
FGS = Ini adalah input pemilih penunjuk kelajuan, yang bermaksud logik tinggi atau rendah mungkin diperkenalkan di sini untuk menghidupkan / mematikan penunjuk FG.
Vcc = Bekalan positif ke IC untuk membolehkannya beroperasi, tidak boleh melebihi 5V.
W, U dan V adalah output 3 fasa untuk motor BLDC yang sepatutnya dikendalikan melalui IC ini. Ini juga bertindak seperti input untuk merasakan denyutan EMF motor untuk peralihan gegelung motor yang disegerakkan.
GND = Merujuk kepada pin bekalan negatif IC berkenaan dengan pin Vdd.
FR = Membantu memilih atau memerintah arah motor dan boleh diubah secara dinamik bila-bila masa setelah sistem dihidupkan, hanya dengan memperkenalkan logik luaran tinggi atau rendah logik.
PWM = Ini menandakan input kawalan PWM dari penjana bentuk gelombang luaran PWM.
Input PWM ini mungkin berubah-ubah untuk melaksanakan kawalan kelajuan motor BLDC yang disambungkan.
Ruang putus-putus di tengah cip menunjukkan pad termal, yang mungkin dijepit atau ditekan dengan heatsink untuk menenggelamkan kemungkinan penjanaan haba pada cip ketika digunakan dengan motor BLDC yang dimuat.
Perbincangan di atas menyatakan pinout atau perincian sambungan cip pemacu motor BLDC tanpa sensor DRV10963, sekarang mari kita menganalisis konfigurasi dalaman dan fungsi cip secara terperinci dengan bantuan perkara berikut:
Penerangan Peranti
DRV10963 adalah pengendali motor elektrik tanpa sensor 3 fasa dengan MOSFET kuasa terbina dalam (3 fasa H-bridged). Ia disesuaikan untuk produktiviti yang lebih tinggi, pengurangan kebisingan dan fungsi penggerak motor bilangan bahan minimum. Skim pengurusan sinusoidal tingkap tanpa sensor-Iess 180 ° yang eksklusif memberikan kecekapan perjalanan motor tanpa bunyi.
DRV10963 yang terdiri daripada fungsi pengesanan kunci pintar, disatukan dengan litar keselamatan tambahan untuk mencapai prestasi yang terjamin. DRV10963 boleh didapati dalam pembungkusan USON 10-pin yang termal dengan tikar termal yang tidak ditutup.
Bagaimana IC Berfungsi
Produk DRV10963 adalah pengendali motor tanpa sensor 3 fasa dengan MOSFET kuasa yang diselitkan
dicipta khas untuk prestasi unggul, pengurangan resonans dan fungsi pemacu motor kiraan bahagian dangkal minimum.
Pelan kawalan sinusoidal 180 tanpa tetingkap tanpa sensor utama menunjukkan motor tanpa suara berfungsi dengan mengekalkan nominal riak tork yang dirangsang elektrik. Setelah diinisialisasi, peranti DRV10963 akan menghidupkan motor dalam arah yang ditentukan melalui pin input FR.
Cip DRV10963 akan berfungsi motor BLDC 3 fasa yang menggunakan rancangan kawalan sinusoidal.
Kepentingan voltan fasa sinusoidal yang digunakan bergantung pada kitaran tugas pin PWM. Semasa motor bergerak, DRV10963 IC menyampaikan data halaju pada pin FG.
Unit DRV10963 terdiri daripada kemampuan akal kunci pintar. Sekiranya motor disekat oleh tekanan luar biasa, program ini akan mengenal pasti masalah penguncian dan akan mengambil langkah-langkah untuk melindungi dengan sendiri bersama motor.
Prosedur tertentu litar pengunci kunci digambarkan secara terperinci dalam Pengesanan Kunci. IC DRV10963 juga merangkumi beberapa litar keselamatan terpasang seperti perlindungan arus, perlindungan voltan, perlindungan voltan, dan perlindungan suhu lebih.
Penjelasan Ciri
Input dan Kawalan Kelajuan
DRV10963 menyajikan output PWM 25-kl-lz 3-fasa yang mungkin mempunyai peratusan bentuk gelombang sinusoidal standard dari fasa ke fasa. Sekiranya sebarang kitaran ditentukan berkaitan dengan tanah, bentuk gelombang yang dikesan kemungkinan merupakan sinusoid terlindung PWM yang digabungkan dengan harmonik urutan ke-3 seperti yang ditunjukkan pada Gambar 2.

Strategi pengekodan ini menyelaraskan spesifikasi pemacu dengan alasan bahawa kemungkinan akan ada output satu fasa yang setara dengan sifar.
Amplitud hasil bervariasi mengikut voltan bekalan (VCC) dan kitaran tugas PWM yang diamanatkan (PWM) seperti yang ditakrifkan dalam Persamaan 1 dan diserlahkan dalam Rajah 3. Amplitud optimum dilaksanakan apabila kitaran tugas PWM yang diarahkan adalah 100 PERATUS.
Vphpk = PWMdc>

Kelajuan motor diatur tidak secara langsung melalui penggunaan perintah PWM untuk mengatur amplitud voltan fasa yang kebetulan digunakan untuk motor.
Kitaran tugas input PWM diubah menjadi kuantiti digital 9 bit (dari 0 hingga 511).
Resolusi peraturan adalah 1/512 == 0.2%. Penganalisis kitaran tugas memudahkan operasi pertukaran pesanan awal di antara kitaran tugas input dan angka digital 9 bit.
Ini diserlahkan dalam Rajah 4, di mana r = 80 ms.

Prestasi pertukaran antara kitaran tugas diperintahkan PWM bersama dengan amplitud maksimum output berubah-ubah pada peranti DRV10963.
Amplitud maksimum hasil dibincangkan oleh Persamaan 1 apabila arahan PWM> kitaran tugas minimum berfungsi. Kitaran tugas operasi yang paling rendah sering ditetapkan hingga mungkin 13%, 10%, 5% atau tidak ada sekatan dengan penetapan OTP (MINOP_DC1: 0).
Jadual 1 menunjukkan konfigurasi yang disyorkan untuk kitaran tugas operasi minimum.
Setiap kali kitaran tugas yang diarahkan PWM kurang dari siklus tugas yang berfungsi paling rendah dan lebih dari 1.5%, output akan diatur pada siklus tugas operasi minimum. Bila-bila masa kitaran tugas input berada di bawah 1.5%, peranti DRV10963 kemungkinan tidak akan menjalankan output, dan dihantar ke mod siap sedia.
Ini dapat digambarkan dalam Rajah 6.

Konfigurasi Putaran
DRV10963 akan menghidupkan motor dengan teknik yang diperincikan dengan terperinci dalam Rajah 7.

Graf inisialisasi motor terdiri daripada alternatif yang dapat dikonfigurasikan oleh peranti untuk gelung terbuka untuk menutup had pertukaran gelung (HOW.), Masa penjajaran (TAHQH), dan kadar pecutan (RACE).
Untuk menyusun pemutar ke logik pergantian, DRV10963 melaksanakan kitaran tugas x% pada fasa V dan W pada masa yang sama mengawal fasa U pada GND.
Senario ini berterusan selama beberapa saat. Kepentingan x% dikenal pasti oleh voltan VCC (seperti yang ditunjukkan dalam Jadual 2) untuk mengekalkan tork putaran yang mencukupi pada pelbagai voltan bekalan yang berbeza.
Ketika urutan jajaran selesai, motor dipaksa untuk mempercepat dengan memasang voltan fasa sinusoidal dengan tahap puncak seperti yang digambarkan dalam Jadual 2 dan meningkatkan dengan jarak rentang pergantian pada kadar yang diperluas yang diwakili oleh RACE sehingga tahap pergantian tumbuh ke Hom ., Hz.
Sebaik sahaja had ini dicapai, DRV'90963 menukar ke mod gelung tertutup di mana kemajuan pemacu pergantian diiktiraf oleh algoritma kawalan terpasang sementara voltan yang digunakan dikenal pasti oleh input kitaran tugas mandatori PWM.
Had pertukaran gelung terbuka untuk menutup gelung (Hom), waktu penjajaran (TAHQH), dan kadar pecutan (RACE) dapat dikonfigurasi melalui konfigurasi OTP.
Pemilihan ambang handoff (HOW,) biasanya disetujui oleh penilaian percubaan dan kesilapan. Objektifnya adalah untuk memilih toleransi handoff yang sesedikit mungkin dan memungkinkan motor untuk beralih dengan mudah dan setia antara percepatan gelung terbuka dan pecutan gelung tertutup.
Motor kelajuan yang meningkat biasanya (kelajuan maksimum) memerlukan toleransi handoff yang lebih baik kerana motor berkelajuan tinggi merangkumi penurunan Kt sehingga BEMF lebih berpatutan.
Jadual 3 menunjukkan pilihan yang boleh dikonfigurasi untuk toleransi handoff. Kelajuan tertinggi dalam elektrik Hz terbukti sebagai rujukan untuk membantu memilih kelajuan penyerahan yang diinginkan untuk penyerahan tertentu.

Pilihan masa penyelarasan (TAHQH) dan kadar percepatan (RACE) bahkan boleh bergantung pada ujian percubaan dan kesalahan.
Motor dengan inersia yang lebih besar biasanya menuntut waktu penjajaran yang lebih panjang dan kadar kelajuan yang lebih perlahan berbeza dengan motor dengan inersia rendah yang biasanya menuntut waktu penjajaran yang lebih singkat bersamaan dengan percepatan percepatan yang lebih cepat. Pengurangan program perlu dilaksanakan untuk memanfaatkan kestabilan pelancaran berbanding dengan tempoh berputar.
TI menyokong bermula dengan memutuskan konfigurasi yang kurang sengit (RACE yang lebih perlahan dan Tmign yang signifikan) untuk menjejaskan masa tork sehingga menyokong kadar pemenuhan maksimum.
Sebaik sahaja peralatan disahkan berfungsi dengan berhati-hati, konfigurasi yang lebih kuat (RACC yang lebih besar dan TAHQH yang lebih rendah) dapat digunakan untuk mengurangkan momen kenaikan dan pada masa yang sama dengan berhati-hati melacak kadar pemenuhan.
Jadual 4 menunjukkan tetapan yang boleh dikonfigurasi untuk TA'g ,, dan RACE.

Bahagian penjelasan yang selebihnya mengenai IC BLDC tanpa sensor ini diberikan dalam lembaran data asal ini
Jangan ragu untuk memberi komen untuk mengetahui lebih lanjut mengenai butiran litar pemandu motor BLDC tanpa sensor yang dibincangkan di atas
Sepasang: Litar Bekalan Kuasa Ransel LED 12V Seterusnya: Litar Kawalan Jauh Quadcopter tanpa MCU