Catatan tersebut membincangkan litar pemacu frekuensi berubah fasa tunggal atau litar VFD untuk mengawal kelajuan motor AC tanpa mempengaruhi spesifikasi operasi mereka.
Apa itu VFD
Motor dan beban induktif serupa yang lain secara khusus tidak 'suka' beroperasi dengan frekuensi yang mungkin tidak sesuai dengan spesifikasi pembuatannya, dan cenderung menjadi tidak cekap jika terpaksa dalam keadaan tidak normal seperti itu.
Contohnya motor yang ditentukan untuk beroperasi dengan 60Hz mungkin tidak disarankan untuk berfungsi dengan frekuensi 50 Hz atau julat lain.
Melakukannya boleh menghasilkan hasil yang tidak diingini seperti pemanasan motor, lebih rendah atau lebih tinggi daripada kelajuan yang diperlukan dan penggunaan yang tinggi secara tidak normal menjadikan keadaan sangat tidak cekap dan penurunan jangka hayat peranti yang disambungkan.
Walau bagaimanapun, motor operasi dalam keadaan frekuensi input yang berbeza sering menjadi paksaan dan dalam keadaan seperti itu, VFD atau litar Pemacu frekuensi berubah boleh menjadi sangat berguna.
VFD adalah perangkat yang memungkinkan pengguna untuk mengawal kecepatan motor AC dengan menyesuaikan frekuensi dan voltan bekalan input sesuai dengan spesifikasi motor.
Ini juga bermaksud bahawa VFD membolehkan kita mengoperasikan motor AC melalui bekalan AC grid yang tersedia tanpa mengira voltan dan spesifikasi frekuensi, dengan menyesuaikan frekuensi dan voltan VFD dengan sesuai mengikut spesifikasi motor.
Ini biasanya dilakukan dengan menggunakan kawalan yang diberikan dalam bentuk tombol pemboleh ubah yang ditala dengan penentukuran frekuensi yang berbeza.
Membuat VFD di rumah mungkin merupakan cadangan yang sukar, namun melihat reka bentuk yang disarankan di bawah menunjukkan bahawa bagaimanapun tidak sukar untuk membina peranti yang sangat berguna ini (direka oleh saya).
Operasi Litar
Litar ini secara asasnya dapat dibahagikan kepada dua peringkat: Tahap pemandu separuh brige dan tahap penjana logik PWM.
Tahap pemandu jambatan separuh menggunakan pemacu jambatan separuh IC IR2110 yang secara sendirian mengurus tahap pemacu motor voltan tinggi yang menggabungkan masing-masing dua mosfet sisi tinggi dan sisi rendah.
IC pemandu membentuk jantung litar namun hanya memerlukan beberapa komponen untuk melaksanakan fungsi penting ini.
IC di atas akan memerlukan logik yang tinggi dan frekuensi logik yang rendah untuk menggerakkan beban yang bersambung pada frekuensi tertentu yang diinginkan.
Isyarat logik input hi dan lo ini menjadi data operasi untuk IC pemandu dan mesti merangkumi isyarat untuk menentukan frekuensi yang ditentukan dan juga PWM dalam fasa dengan AC utama.
Maklumat di atas dibuat oleh tahap lain yang terdiri daripada beberapa 555 IC dan satu dekad. IC 4017.
Kedua-dua 555 IC bertanggungjawab untuk menghasilkan PWM gelombang sinus yang diubah suai sesuai dengan sampel AC gelombang penuh yang berasal dari output penerus jambatan yang diturunkan.
IC4017 berfungsi sebagai penjana logik output tiang totem yang kadar frekuensi bergantian menjadi frekuensi UTAMA menentukan parameter litar.
Kekerapan penentu ini dipetik dari pin # 3 IC1 yang juga memberi pin pemicu IC2 keluar dan untuk membuat PWM yang diubah pada pin # 3 IC2.
PWM gelombang sinus yang diubahsuai diimbas pada output IC 4017 sebelum memberi makan IR2110 untuk meletakkan 'cetak' tepat PWM yang diubah pada output pemandu jambatan separuh dan akhirnya untuk motor yang sedang dikendalikan.
Nilai pot Cx dan 180k harus dipilih atau disesuaikan dengan tepat untuk memberikan frekuensi yang ditentukan untuk motor.
Voltan tinggi di longkang mosfet sisi tinggi juga mesti dikira dengan tepat dan diturunkan dengan membetulkan AC voltan utama yang ada setelah menaikkannya atau menurunkannya sesuai dengan spesifikasi motor.
Tetapan di atas akan menentukan voltan yang betul bagi setiap Hertz (V / Hz) untuk motor tertentu.
Voltan bekalan untuk kedua-dua peringkat dapat dibuat menjadi saluran umum, sama untuk sambungan tanah.
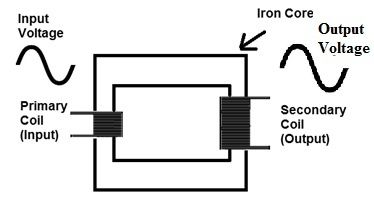
TR1 adalah transformer turun 0-12V / 100mA yang menyediakan litar dengan voltan bekalan operasi yang diperlukan.
Litar Pengawal PWM

Anda harus mengintegrasikan output dari IC 4017 dari rajah di atas ke input HIN dan LIN dari rajah berikut, dengan tepat. Sambungkan juga dioda 1N4148 yang ditunjukkan dalam rajah di atas dengan pintu MOSFET sisi rendah seperti yang ditunjukkan dalam rajah di bawah.
Pemandu Motor Full Bridge

Kemas kini:

Reka bentuk VFD tunggal sederhana yang dibincangkan di atas dapat dipermudahkan dan diperbaiki dengan menggunakan IC IRS2453 jambatan penuh berayun sendiri, seperti yang ditunjukkan di bawah:
Di sini IC 4017 dihapuskan sepenuhnya kerana pemandu jambatan ful dilengkapi dengan tahap pengayunnya sendiri, dan oleh itu tidak diperlukan pemicu luaran untuk IC ini.
Sebagai reka bentuk jambatan penuh, kawalan output ke motor mempunyai julat penyesuaian kelajuan sifar hingga maksimum.
Pot pada pin # 5 IC 2 dapat digunakan untuk mengawal kelajuan dan tork motor melalui kaedah PWM.
Untuk kawalan kelajuan V / Hz, Rt / Ct yang berkaitan dengan IRS2453 dan R1 yang berkaitan dengan IC1 masing-masing dapat di-tweak (secara manual) untuk mendapatkan hasil yang sesuai.
Memudahkan Lebih Banyak

Sekiranya anda mendapati bahagian jambatan penuh terlalu banyak, anda boleh menggantinya dengan litar jambatan penuh berasaskan P, N-MOSFET seperti gambar di bawah. Pemacu frekuensi berubah ini menggunakan konsep yang sama kecuali bahagian pemacu jambatan penuh yang menggunakan MOSFET saluran P di bahagian tinggi dan MOSFET saluran N di sebelah rendah.
Walaupun konfigurasi kelihatan tidak cekap kerana penglibatan MOSFET saluran-P (kerana penilaian RDSon yang tinggi), penggunaan banyak P-MOSFET selari mungkin kelihatan seperti pendekatan yang berkesan untuk menyelesaikan masalah rendah RDSon.
Di sini 3 MOSFET digunakan secara selari untuk peranti saluran P untuk memastikan pemanasan minimum peranti, setanding dengan rakan saluran N.
Sebelumnya: Cara Melindungi MOSFET - Asas yang dijelaskan Seterusnya: Litar Tracker I / V untuk Aplikasi Solar MPPT