Penilaian pertama yang berjaya mengenai teori kawalan PID secara praktikal disahkan dalam bidang sistem stereng automatik untuk kapal, sejak sekitar tahun 1920. Setelah ini diterapkan dalam pelbagai kawalan proses automatik industri yang memerlukan spesifikasi output pembuatan yang dioptimumkan dan tepat. Untuk unit pembuatan PID dilaksanakan dengan popular untuk mencapai kawalan pneumatik yang tepat, dan akhirnya teori PID diterapkan dalam pengawal elektronik pada zaman moden.
Apa itu Pengawal PID
Istilah PID adalah akronim untuk pengawal derivatif integral berkadar, yang merupakan mekanisme gelung maklum balas, yang dirancang untuk mengawal dengan tepat pelbagai mesin kawalan industri, dan banyak aplikasi serupa lainnya yang memerlukan kawalan modulasi kritikal dan automatik.
Untuk melaksanakannya, pengawal PID terus memantau operasi sistem, dan mengira elemen kesalahan yang disebabkan. Ia kemudian menilai nilai ralat seketika ini dalam bentuk perbezaan antara set-point yang diperlukan (SP), dan pemboleh ubah proses yang diukur (PV).
Dengan merujuk kepada perkara di atas, pembetulan maklum balas seketika dan automatik dilakukan dalam bentuk ungkapan proporsional (P), integral (I), dan derivatif (D), dan dengan itu nama pengawal PID.
Dengan kata mudah pengawal PID terus memantau kerja sistem mesin tertentu, dan terus membetulkan tindak balas outputnya bergantung pada variasi yang disebabkan oleh pengaruh luaran, melalui algoritma yang ditentukan. Oleh itu ia memastikan bahawa mesin sentiasa berfungsi dalam keadaan ideal yang ditetapkan.
Memahami Rajah Blok PID
Pengawal PID dianggap sebagai sistem kawalan serba boleh kerana kemampuannya untuk mengesan dan mengurus 3 parameter kawalan: berkadar, integral dan derivatif, dan menerapkan kontrol optimal yang diinginkan pada output dengan ketepatan yang ekstrim, dengan merujuk pada 3 parameter ini.
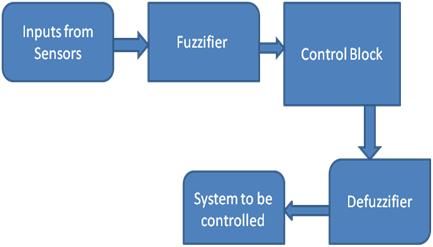
Gambar di bawah menunjukkan gambarajah blok PID. Kita dapat dengan cepat memahami prinsip asas kerja PID dengan merujuk pada gambarajah blok ini.

gambar ihsan: en.wikipedia.org/wiki/File:PID_en.svg
Di sini kita dapat melihat satu set pemboleh ubah seperti e (t) yang sesuai dengan nilai ralat, r (t) sesuai dengan titik set yang disasarkan, dan y (t) sebagai pemboleh ubah proses yang diukur. Pengawal PID sepanjang operasinya memantau nilai ralat e (t) dengan menilai perbezaan antara setpoint yang dimaksudkan r (t) atau SP dan nilai proses yang diukur y (t) atau PV, dan akibatnya melaksanakan pembetulan atau pengoptimuman maklum balas menggunakan parameter iaitu: proporsional, integral, dan derivative.
Pengawal terus berusaha untuk mengurangkan kesan ralat sepanjang masa, dengan menyesuaikan pemboleh ubah kawalan u (t) ke nilai baru berdasarkan jumlah wajaran terma kawalan yang dianalisis (p, I, d).
Sebagai contoh, dalam operasi kawalan injap, pembukaan dan penutupannya dapat terus diubah oleh PID melalui penilaian yang kompleks, seperti yang dijelaskan di atas.
Dalam sistem yang ditunjukkan, pelbagai istilah dapat difahami seperti yang dijelaskan di bawah:
P- Pengawal:
Istilah P berkadaran dengan nilai ralat seketika e (t) yang diperoleh dengan menilai hasilnya untuk SP - PV. Dalam keadaan ketika nilai ralat cenderung menjadi besar, output kawalan juga bertambah lebih besar dengan merujuk kepada faktor keuntungan 'K'. Namun dalam proses yang memerlukan kompensasi seperti dalam pengawalan suhu, pengendalian berkadar dapat menyebabkan ketidaktepatan di titik titik dan nilai proses yang sebenarnya, kerana tidak dapat berfungsi dengan memuaskan tanpa maklum balas kesalahan untuk menghasilkan tindak balas berkadar. Menyiratkan bahawa tanpa maklum balas ralat, tindak balas pembetulan yang tepat mungkin tidak mungkin dilakukan.
I- Pengawal:
Istilah I menjadi bertanggungjawab atas nilai kesalahan SP - PV yang telah dinilai sebelumnya, dan mengintegrasikannya selama tempoh operasinya untuk membuat istilah I. Sebagai contoh semasa kawalan berkadar diterapkan jika SP - PV menghasilkan beberapa kesalahan, parameter I menjadi aktif dan berusaha untuk menamatkan kesalahan ini. Ini sebenarnya berlaku dengan tindak balas kawalan yang dicetuskan kerana nilai kumulatif kesalahan yang direkodkan pada waktu yang lebih awal. Sebaik sahaja ini berlaku, istilah I berhenti bertambah jauh. Ini menyebabkan kesan berkadar untuk dikurangkan dengan sewajarnya sebagai faktor kesalahan yang hilang, walaupun ini juga akan dikompensasi ketika kesan integral berkembang.
D- Pengawal:
Istilah D adalah penghampiran yang paling sesuai yang disimpulkan untuk tren yang berubah untuk ralat SP - PV, bergantung pada kadar perubahan seketika faktor ralat. Sekiranya kadar perubahan ini meningkat dengan cepat, kawalan maklum balas dilaksanakan dengan lebih agresif, dan sebaliknya.
Apa itu PID Tuning
Parameter yang dibincangkan di atas mungkin memerlukan pengimbangan yang tepat untuk memastikan fungsi kawalan yang optimum, dan ini dicapai melalui proses yang disebut 'loop tuning'. Pemalar penalaan yang terlibat dilambangkan sebagai 'K' seperti yang ditunjukkan dalam pemotongan berikut. Setiap pemalar ini mesti dibuat secara individu untuk aplikasi yang dipilih, kerana pemalar bergantung sepenuhnya dan berbeza mengikut ciri dan pengaruh parameter luaran tertentu yang terlibat dalam gelung. Ini mungkin merangkumi tindak balas sensor yang digunakan untuk mengukur parameter tertentu, elemen pendikit akhir seperti injap kawalan, kemungkinan berlalunya masa dalam isyarat gelung dan proses itu sendiri dll.
Mungkin dapat digunakan untuk menggunakan nilai yang hampir untuk pemalar pada awal pelaksanaan berdasarkan jenis aplikasi tetapi ini akhirnya memerlukan sedikit penyesuaian dan penyesuaian yang serius melalui eksperimen praktikal, dengan memaksa perubahan pada titik set dan seterusnya memerhatikan tindak balas kawalan sistem.
Sama ada model matematik atau gelung praktikal, keduanya dapat dilihat menggunakan tindakan kawalan 'langsung' untuk istilah yang ditentukan. Bermakna ketika peningkatan kesalahan positif dikesan, kawalan positif yang meningkat akan dimulai untuk mengendalikan situasi untuk kesimpulan yang disimpulkan.
Namun ini mungkin diperlukan untuk dibalikkan dalam aplikasi di mana parameter output mungkin memiliki karakteristik yang dikonfigurasi secara berlawanan yang memerlukan tindakan pembetulan terbalik. Mari kita perhatikan contoh gelung aliran di mana proses pembukaan injap ditentukan untuk beroperasi menggunakan output 100% dan 0%, tetapi perlu dikendalikan dengan output 0% dan 100% yang sepadan, dalam hal ini kawalan pembetulan terbalik menjadi penting. Untuk lebih tepat, pertimbangkan sistem penyejukan air yang mempunyai ciri perlindungan di mana injapnya perlu dibuka 100% semasa kehilangan isyarat. Dalam kes ini, output pengawal mesti dapat berubah menjadi 0% kawalan jika tidak ada isyarat, sehingga injap dapat dibuka pada 100% penuh, ini disebut sebagai kawalan 'lakonan terbalik'.
Model Matematik Fungsi Kawalan

Dalam model matematik ini, semua pemalar bukan negatif Kp, Ki, dan Kd menandakan pekali untuk istilah berkadar, kamiran, dan terbitan masing-masing (pada beberapa kesempatan ini juga dilambangkan P, I, dan D).
Menyesuaikan Syarat Kawalan PID
Dari perbincangan di atas, kami memahami bahawa sistem kawalan PID secara asasnya berfungsi dengan tiga parameter kawalan, namun beberapa aplikasi yang lebih kecil mungkin lebih suka menggunakan beberapa istilah ini atau bahkan satu istilah dari ketiga istilah tersebut.
Penyesuaian dilakukan dengan menjadikan istilah yang tidak digunakan menjadi tetapan sifar, dan memasukkan beberapa istilah PI, PD atau istilah tunggal seperti P atau I. Antaranya, konfigurasi pengawal PI lebih biasa kerana istilah D biasanya terdedah kepada kebisingan mempengaruhi dan oleh itu dihapuskan dalam kebanyakan kes, melainkan jika wajib. Istilah I biasanya disertakan kerana memastikan sistem dapat mencapai nilai sasaran optimum yang diinginkan pada output.
Sebelumnya: Cara Merangka Penukar Flyback - Tutorial Komprehensif Seterusnya: Stabilizer Voltan Automatik 5 KVA hingga 10 KVA - 220 Volt, 120 Volt