Dalam catatan ini kita membincangkan pembuatan rangkaian pengawal kelajuan motor aruhan 3 fasa sederhana, yang juga dapat digunakan untuk motor induksi fasa tunggal atau secara harfiah untuk jenis motor AC apa pun.
Apabila sampai mengawal kelajuan motor aruhan , biasanya penukar matriks digunakan, melibatkan banyak peringkat yang kompleks seperti penapis LC, tatasusunan dwi-arah suis (menggunakan IGBT) dll.
Semua ini digunakan untuk akhirnya mencapai isyarat AC cincang yang kitaran tugasnya dapat disesuaikan menggunakan litar mikrokontroler kompleks, akhirnya memberikan kawalan kelajuan motor yang diperlukan.
Walau bagaimanapun, kami boleh bereksperimen dan berusaha untuk mencapai kawalan kelajuan motor aruhan 3 fasa melalui konsep yang lebih mudah menggunakan IC penyambung optik penyilang sifar canggih, triac kuasa dan litar PWM.
Menggunakan Zero Crossing Detector Opto Coupler
Terima kasih kepada rangkaian optocoupler MOC yang menjadikan litar kawalan triac sangat selamat dan mudah dikonfigurasikan, dan memungkinkan penyatuan PWM tanpa gangguan untuk kawalan yang dimaksudkan.
Dalam salah satu catatan saya sebelum ini, saya membincangkan yang ringkas Litar pengawal motor permulaan lembut PWM yang menerapkan IC MOC3063 untuk memberikan permulaan lembut yang berkesan pada motor yang disambungkan.
Di sini juga kita menggunakan kaedah yang sama untuk menegakkan litar pengawal kelajuan motor aruhan 3 fasa yang dicadangkan, gambar berikut menunjukkan bagaimana ini dapat dilakukan:
Dalam gambar tersebut kita dapat melihat tiga tahap pengganding optik MOC yang dikonfigurasi dalam mod pengatur triac standard mereka, dan sisi input yang disatukan dengan litar IC 555 PWM ringkas .
Litar 3 MOC dikonfigurasikan untuk menangani input AC 3 fasa dan memberikan yang sama ke motor aruhan yang terpasang.
Input PWM di bahagian kawalan LED terpencil opto menentukan nisbah memotong input AC 3 fasa yang sedang diproses oleh MOC ICS.
Menggunakan Pengawal IC 555 PWM (Pengalihan Voltan Sifar)
Itu menunjukkan, dengan menyesuaikan Pot PWM yang berkaitan dengan IC 555 seseorang dapat mengawal kelajuan motor aruhan dengan berkesan.
Keluaran pada pin # 3 dilengkapi dengan kitaran tugas yang berbeza-beza yang pada gilirannya menukar triac output dengan sewajarnya, yang mengakibatkan kenaikan nilai AC RMS atau penurunan yang sama.
Meningkatkan RMS melalui PWM yang lebih luas membolehkan mendapatkan kelajuan yang lebih tinggi pada motor, sementara menurunkan RMS AC melalui PWM yang lebih sempit menghasilkan kesan yang bertentangan, kerana itu menyebabkan motor berkurang secara berkadar.
Ciri-ciri di atas dilaksanakan dengan banyak ketepatan dan keselamatan kerana IC ditugaskan dengan banyak ciri canggih dalaman, yang ditujukan khusus untuk memandu triac dan beban induktif yang berat seperti motor aruhan, solenoid, injap, kontaktor, relay keadaan pepejal dll.
IC juga memastikan operasi terpencil yang sempurna untuk tahap DC yang membolehkan pengguna membuat penyesuaian tanpa rasa takut akan kejutan elektrik.
Prinsip ini juga dapat digunakan secara efisien untuk mengendalikan kecepatan motor fasa tunggal, dengan menggunakan IC MOC tunggal dan bukan 3.
Reka bentuk sebenarnya berdasarkan pemacu triac berkadar masa teori. Litar PWM IC555 atas dapat disesuaikan untuk menghasilkan kitaran tugas 50% pada frekuensi yang jauh lebih tinggi, sementara litar PWM bawah dapat digunakan untuk melaksanakan operasi pengendalian kelajuan motor induksi melalui penyesuaian periuk yang berkaitan.
IC 555 ini disyorkan mempunyai frekuensi yang lebih rendah daripada litar IC 555 atas. Ini mungkin dilakukan dengan meningkatkan kapasitor pin # 6/2 menjadi sekitar 100nF.

CATATAN: MENAMBAHKAN INDUKTOR YANG SESUAI DALAM SIRI DENGAN KAWASAN FASA BOLEH MENINGKATKAN PRESTASI PENGENDALIAN KECEPATAN DENGAN DRASTIKAL.
Diandaikan Bentuk Gelombang dan Fasa Kawalan menggunakan Konsep di atas:

Kaedah yang dijelaskan di atas untuk mengawal motor aruhan 3 fasa sebenarnya agak kasar sejak ia berlaku tiada kawalan V / Hz .
Ia hanya menukar ON / OFF utama pada kadar yang berbeza untuk menghasilkan kuasa rata-rata ke motor dan mengawal kelajuan dengan mengubah AC rata-rata ini ke motor.
Bayangkan jika anda menghidupkan / mematikan motor secara manual 40 kali atau 50 kali seminit. Ini akan mengakibatkan motor anda melambat hingga beberapa nilai rata-rata relatif, namun bergerak secara berterusan. Prinsip di atas berfungsi dengan cara yang sama.
Pendekatan yang lebih teknikal adalah merancang litar yang memastikan kawalan yang betul terhadap nisbah V / Hz dan secara automatik menyesuaikannya sama bergantung pada kelajuan slip atau turun naik voltan.
Untuk ini pada dasarnya kami menggunakan peringkat berikut:
- Litar pemacu H-Bridge atau Full Bridge IGBT
- Tahap Penjana 3 Fasa untuk Memakan Litar Jambatan Penuh
- Pemproses PWM V / Hz
Menggunakan Litar kawalan IGBT Jambatan Penuh
Sekiranya prosedur penyediaan reka bentuk berdasarkan triac di atas kelihatan menakutkan bagi anda, kawalan kelajuan motor aruhan berasaskan PWM jambatan penuh berikut boleh dicuba:

Litar yang ditunjukkan dalam gambar di atas menggunakan pemacu jambatan penuh cip tunggal IC IRS2330 (versi terbaru adalah 6EDL04I06NT) yang mempunyai semua ciri terpasang untuk memuaskan operasi motor 3 fasa yang selamat dan sempurna.
IC hanya memerlukan input logik 3 fasa yang disegerakkan di pin pin HIN / LIN untuk menghasilkan output berayun 3 fasa yang diperlukan, yang akhirnya digunakan untuk mengendalikan rangkaian IGBT jambatan penuh dan motor 3 fasa yang disambungkan.
The suntikan PWM kawalan kelajuan dilaksanakan melalui 3 peringkat pemacu NPN / PNP setengah jambatan yang terpisah, dikendalikan dengan suapan SPWM dari penjana IC 555 PWM seperti yang dilihat dalam reka bentuk kami sebelumnya. Tahap PWM ini akhirnya dapat digunakan untuk mengawal kelajuan motor aruhan.
Sebelum kita mengetahui kaedah kawalan kelajuan sebenar untuk motor aruhan, mari kita fahami terlebih dahulu bagaimana automatiknya Kawalan V / Hz dapat dicapai dengan menggunakan beberapa rangkaian IC 555, seperti yang dibincangkan di bawah
Litar Pemproses VW / Hz PWM Automatik (Gelung Tertutup)
Pada bahagian di atas kami mempelajari reka bentuk yang akan membantu motor aruhan bergerak pada kadar yang ditentukan oleh pengeluar, tetapi ia tidak akan menyesuaikan diri mengikut nisbah V / Hz tetap kecuali pemproses PWM berikut disatukan dengan H - Suapan input PWM Bridge.

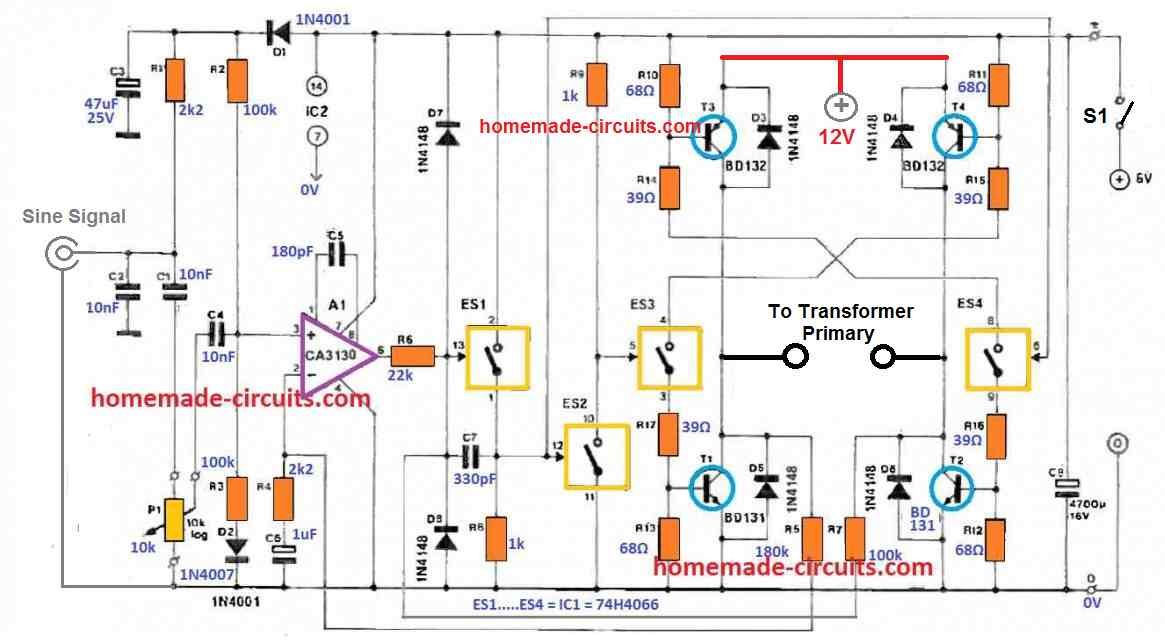
Litar di atas adalah ringkas Penjana PWM menggunakan beberapa IC 555 . IC1 menghasilkan frekuensi PWM yang diubah menjadi gelombang segitiga pada pin # 6 IC2 dengan bantuan R4 / C3.
Gelombang segitiga ini dibandingkan dengan riak gelombang sinus pada pin # 5 IC2. Riak sampel ini diperoleh dengan membetulkan rangkaian AC 3 fasa menjadi riak AC 12V dan dimasukkan ke pin # 5 IC2 untuk pemprosesan yang diperlukan.
Dengan membandingkan dua bentuk gelombang, dimensi yang tepat SPWM dihasilkan di pin # 3 IC2, yang menjadi PWM penggerak untuk rangkaian H-bridge.
Bagaimana Litar V / Hz Berfungsi
Apabila kuasa dihidupkan ON kapasitor pada pin # 5 bermula dengan memberikan voltan sifar pada pin # 5 yang menyebabkan nilai SPWM terendah ke Litar jambatan H , yang seterusnya membolehkan motor aruhan untuk memulakan dengan permulaan yang perlahan secara beransur-ansur.
Oleh kerana kapasitor ini mengecas, potensi pada pin # 5 meningkat yang menaikkan SPWM secara proporsional dan membolehkan motor memperoleh kelajuan secara beransur-ansur.
Kita juga dapat melihat litar maklum balas tachometer yang juga disatukan dengan pin # 5 IC2.
Ini takometer memantau kelajuan pemutar atau kelajuan slip dan menghasilkan voltan tambahan pada pin # 5 IC2.
Sekarang apabila kelajuan motor meningkat, kelajuan slip cuba diselaraskan dengan frekuensi stator dan dalam prosesnya, ia mulai mendapat kelajuan.
Peningkatan slip induksi ini meningkatkan voltan takometer secara berkadar yang seterusnya menyebabkan IC2 meningkat Keluaran SPWM dan ini seterusnya meningkatkan kelajuan motor.
Penyesuaian di atas cuba mengekalkan nisbah V / Hz ke tahap yang agak tetap sehingga akhirnya apabila SPWM dari IC2 tidak dapat meningkat lebih jauh.
Pada tahap ini kelajuan slip dan kelajuan stator memperoleh keadaan stabil dan ini dikekalkan sehingga voltan input atau kelajuan slip (kerana beban) tidak berubah. Sekiranya ini diubah, rangkaian pemproses V / Hz sekali lagi bertindak dan mula menyesuaikan nisbah untuk mengekalkan tindak balas optimum kelajuan motor aruhan.
Tachometer
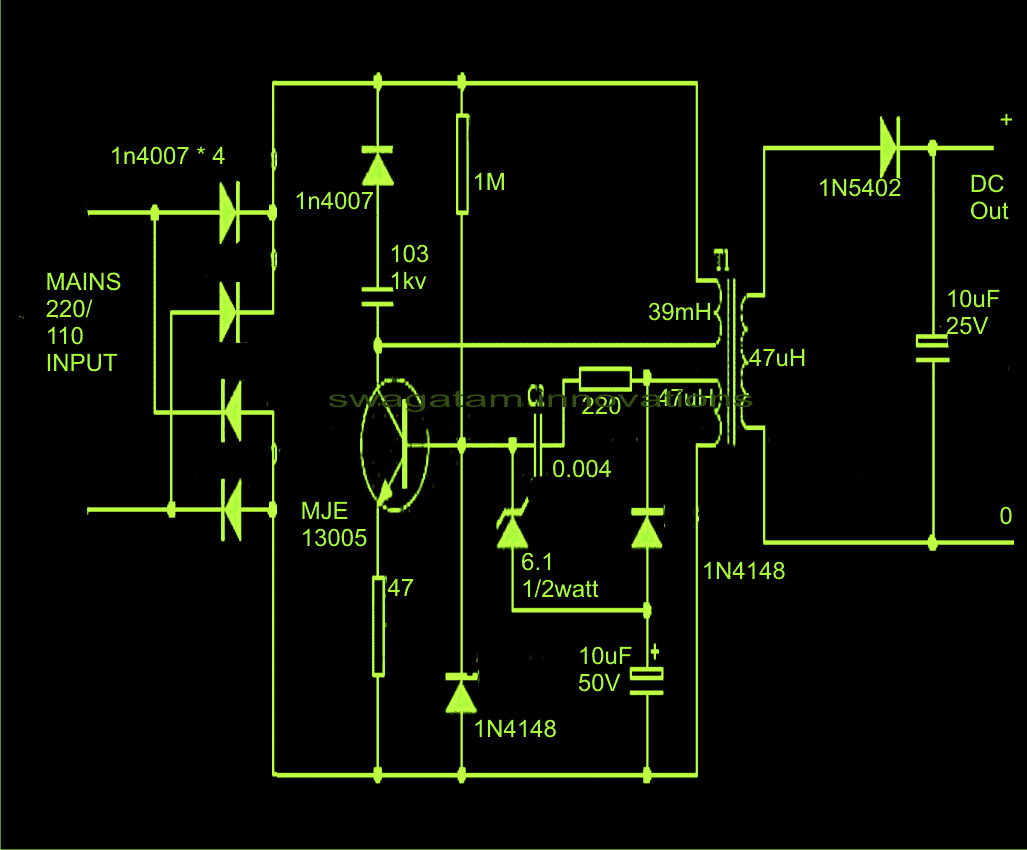
The Litar takometer boleh dibina dengan murah menggunakan litar sederhana berikut dan disatukan dengan peringkat litar yang dijelaskan di atas:

Cara Melaksanakan Kawalan Kelajuan
Dalam perenggan di atas kami memahami proses regulasi automatik yang dapat dicapai dengan mengintegrasikan a maklum balas takometer ke litar pengawal SPWM yang mengawal selia secara automatik.
Sekarang mari kita pelajari bagaimana kelajuan motor induksi dapat dikendalikan dengan mengubah frekuensi, yang akhirnya akan memaksa SPWM turun dan mengekalkan nisbah V / Hz yang betul.
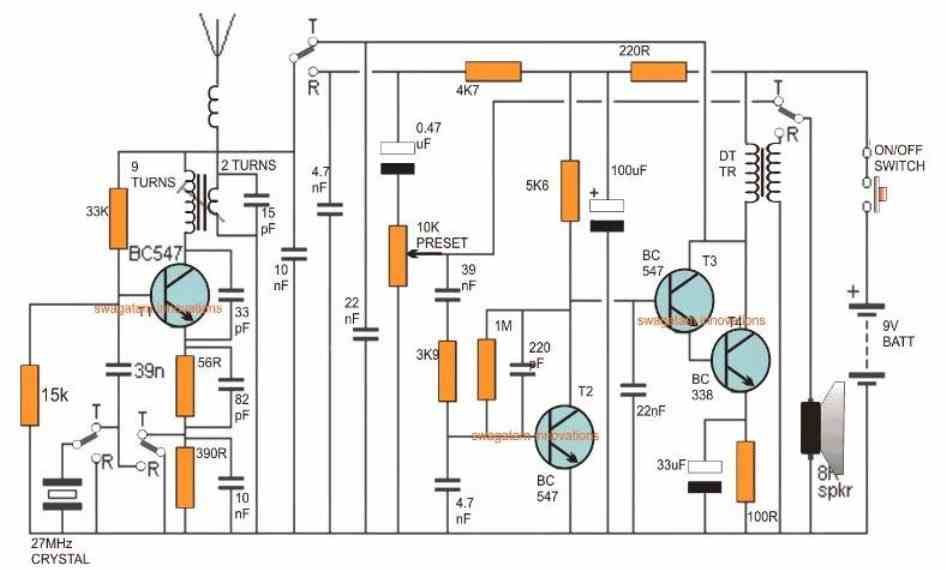
Gambar rajah berikut menerangkan tahap kawalan kelajuan:

Di sini kita dapat melihat rangkaian penjana 3 fasa menggunakan IC 4035 yang frekuensi pergeseran fasa dapat diubah dengan memvariasikan input jam pada pin # 6nya.
Isyarat 3 fasa diterapkan di pintu 4049 IC untuk menghasilkan suapan HIN, LIN yang diperlukan untuk rangkaian pemacu jambatan penuh.
Ini menunjukkan bahawa dengan mengubah frekuensi jam IC 4035 dengan tepat, kita dapat mengubah frekuensi operasi 3-fasa motor induksi dengan berkesan.
Ini dilaksanakan melalui litar astabel IC 555 sederhana yang memberi makan frekuensi boleh laras pada pin # 6 IC 4035, dan membolehkan frekuensi disesuaikan melalui periuk 100K yang terpasang. Kapasitor C perlu dikira sedemikian rupa sehingga julat frekuensi boleh laras berada dalam spesifikasi yang betul dari motor aruhan yang disambungkan.
Apabila panci frekuensi berubah-ubah, frekuensi efektif motor induksi juga berubah, yang juga mengubah kelajuan motor.
Contohnya apabila frekuensi dikurangkan, menyebabkan kelajuan motor berkurang, yang seterusnya menyebabkan output tachometer mengurangkan voltan secara berkadar.
Pengurangan berkadar output tachometer ini memaksa SPWM mengecil dan dengan itu menurunkan output voltan ke motor secara berkadar.
Tindakan ini seterusnya memastikan bahawa nisbah V / Hz dikekalkan semasa mengawal kelajuan motor aruhan melalui kawalan frekuensi.
Amaran: Konsep di atas direka berdasarkan andaian teori sahaja, sila teruskan dengan berhati-hati.
Sekiranya anda mempunyai keraguan lebih lanjut mengenai reka bentuk pengawal kelajuan motor aruhan 3-fasa ini, anda amat dialu-alukan untuk menghantar perkara yang sama melalui komen anda.
Sebelumnya: Cara Merangka Litar Bekalan Tenaga Tidak Terputus (UPS) Seterusnya: Menghidupkan / Mematikan Dua Beban Alternatif dengan IC 555