Mesin elektrik yang menukar tenaga elektrik menjadi tenaga mekanikal dipanggil motor elektrik. Motor elektrik pertama dan terpenting adalah peranti elektrostatik ringkas yang dicipta oleh sami Scotland Andrew Gordon pada tahun 1740-an. Tetapi pada tahun 1821, Michael Faraday menunjukkan penukaran tenaga elektrik menjadi tenaga mekanikal.
Motor elektrik terutamanya dikelaskan kepada dua kategori: motor AC dan Motor DC . Sekali lagi, setiap kategori dibahagikan kepada banyak jenis. Banyak beban seperti pengadun, penggiling, kipas, dan lain-lain, perkakas rumah yang paling kerap digunakan di mana kita dapat menemui pelbagai jenis motor dan ini dapat dikendalikan pada kelajuan yang berbeza dengan penyediaan motor yang mengawal kelajuan. Dalam artikel ini, kita akan membincangkan mengenai salah satu jenis utama motor DC, iaitu Motor stepper dan kawalannya menggunakan mikrokontroler.
Motor Stepper
Segerak dan motor DC tanpa berus yang menukar denyutan elektrik menjadi pergerakan mekanikal dan dengan itu, berputar secara berperingkat dengan sudut tertentu antara setiap langkah untuk menyelesaikan putaran penuh disebut sebagai Motor Stepper. Sudut antara langkah putaran motor stepper disebut sebagai sudut stepper motor.

Motor Stepper
Motor Stepper dikelaskan kepada dua jenis mengikut penggulungannya: Motor Stepper Motors Unipolar dan Motor Stepper Bipolar. Motor stepper unipolar sering digunakan dalam banyak aplikasi kerana kemudahan pengoperasiannya berbanding motor stepper bipolar. Tetapi terdapat pelbagai jenis motor stepper seperti Permanent Magnet Stepper Motor, Variable Reluctance Stepper Motor, dan Hybrid Stepper Motor.
Kawalan Motor Stepper
Motor stepper dapat dikendalikan dengan pelbagai teknik, tetapi di sini kita membincangkan kawalan motor stepper menggunakan Pengawal mikro Atmega . 89C51 adalah mikrokontroler dari 8051 keluarga pengawal mikro .

Blok Diagram Kawalan Motor Stepper
Gambarajah blok kawalan motor stepper menggunakan mikrokontroler 8051 ditunjukkan dalam rajah dengan bekalan kuasa , mikrokontroler, motor stepper dan blok suis kawalan.
2 Kaedah Untuk Merangka Litar Kawalan Motor Stepper
Pengawal motor stepper dirancang menggunakan 8051 mikrokontroler dan litar pensuisan untuk mengawal kelajuan motor stepper. Litar suis kawalan boleh dirancang dengan menggunakan suis transistor atau dengan menggunakan IC pengawal motor stepper seperti ULN2003 sebagai pengganti transistor.
1. Litar Kawalan Menggunakan IC Pengawal Motor Stepper
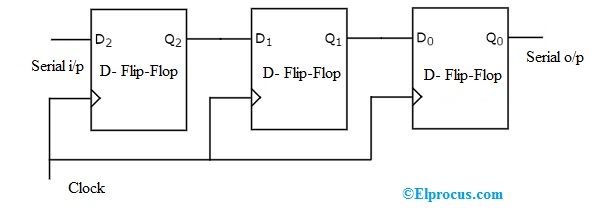
Motor stepper unipolar dapat diputar dengan memberi tenaga pada gegelung stator secara berurutan. Urutan isyarat voltan yang digunakan pada gegelung motor atau plumbum cukup untuk menggerakkan motor dan oleh itu, litar pemandu tidak diperlukan untuk mengawal arah arus di gegelung stator.

Stepper Motor Control menggunakan IC
Motor dua fasa-stepper terdiri daripada empat wayar hujung yang disambungkan ke gegelung dan dua wayar biasa yang disambungkan ke dua hujung membawa ke dua fasa. Titik dan titik akhir kedua-dua fasa saling terhubung ke tanah atau Vcc dan pin mikrokontroler, masing-masing. Untuk memutar motor, titik akhir dari dua fasa harus diberi tenaga. Terutamanya voltan digunakan pada titik akhir pertama fasa1, dan voltan seterusnya digunakan pada titik akhir pertama fasa2, dan seterusnya.
Motor stepper dapat dikendalikan dalam mod yang berbeza seperti Mode Melangkah Pemacu Gelombang, Mod Melangkah Pemacu Penuh dan Mod Melangkah Half Drive.
Mod Melangkah Pemacu Gelombang
Dengan mengulangi urutan di atas, motor dapat diputar dalam mod pemacu gelombang-gelombang sama ada mengikut arah jam atau berlawanan arah jam berdasarkan pemilihan titik akhir. Jadual di bawah menunjukkan urutan fasa isyarat untuk mod pemacu gelombang-gelombang.


Mod Melangkah Pemacu Gelombang
Mod Melangkah Pemacu Penuh
Memberi tenaga kepada dua titik akhir fasa yang berbeza secara serentak mencapai mod pemacu penuh. Jadual menunjukkan urutan fasa isyarat untuk mod pemacu pemacu penuh.


Mod Melangkah Pemacu Penuh
Mod Melangkah Half Drive
Kombinasi langkah-langkah gelombang dan mod langkah-penuh-langkah mencapai mod setengah-langkah-melangkah. Oleh itu, dalam mod ini, sudut melangkah terbahagi kepada separuh. Jadual menunjukkan urutan fasa isyarat mod pemacu setengah pemacu.


Mod Melangkah Half Drive
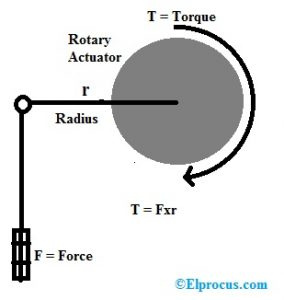
Secara amnya, sudut melangkah bergantung pada resolusi motor stepper. Ukuran langkah dan arah putaran berkadar terus dengan bilangan dan urutan urutan input. Kelajuan putaran poros bergantung pada kekerapan urutan input. Tork dan bilangan magnet yang dimagnetkan dalam satu masa adalah berkadar.
Motor stepper memerlukan arus 60mA, tetapi penarafan maksimum semasa mikrokontroler Atmega AT89C51 adalah 50mA. Oleh itu, stepper-motor-controller ICdigunakan untuk menghubungkan motor stepper dengan mikrokontroler untuk memindahkan isyarat.
2. Litar Suis Kawalan Menggunakan Transistor
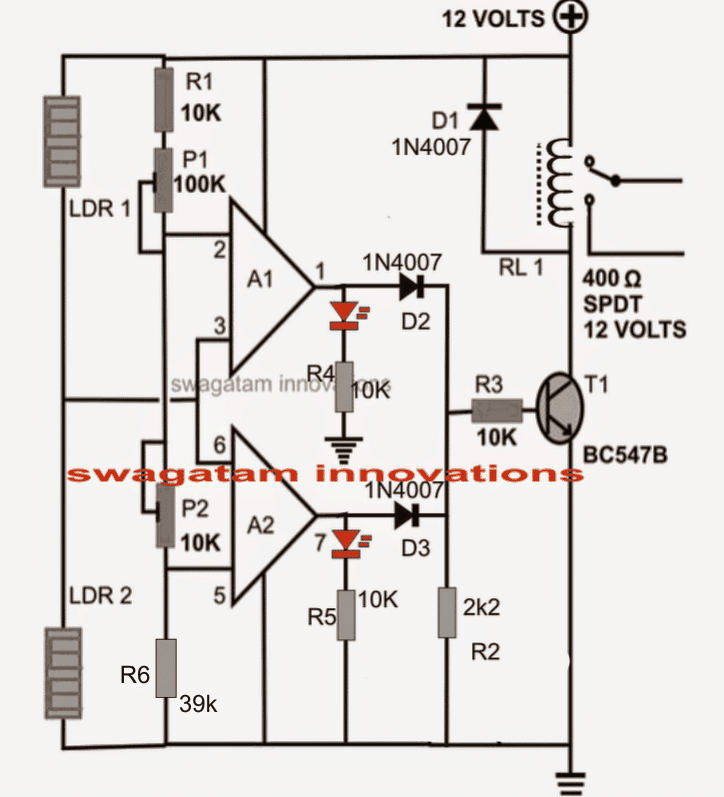
Bekalan kuasa ke litar dapat diberikan dengan menurunkan voltan dari 230V hingga 7.5V menggunakan transformer step-down, dan kemudian membetulkan oleh penerus jambatan dengan dioda . Output yang diperbaiki ini diumpankan ke kapasitor penapis, dan kemudian melewati pengatur voltan. Output terkawal 5V diperoleh dari pengatur voltan. Pin9 reset disambungkan antara kapasitor dan perintang.

Litar Kawalan Motor Stepper menggunakan Transistor
Secara umum, motor stepper terdiri daripada empat gegelung seperti yang ditunjukkan dalam gambar. Oleh itu, untuk menggerakkan motor, diperlukan empat litar pemandu motor. Daripada menggunakan IC pengawal motor stepper untuk menggerakkan motor, empat transistor disambungkan sebagai litar pemacu masing-masing pada 21, 22, 23 dan 24 pin mikrokontroler.
Sekiranya transistor memulakan konduksi, maka medan magnet akan dibuat di sekitar gegelung menyebabkan putaran motor. Kelajuan motor stepper berkadar terus dengan frekuensi nadi input. Pengayun kristal disambungkan ke pin 18 dan 19 untuk memberikan frekuensi jam mikrokontroler sekitar 11.019MHz.
Masa pelaksanaan sebarang arahan dapat dikira dengan menggunakan formula di bawah
Masa = ((C * 12)) / f
Di mana C = bilangan kitaran
Dan F = frekuensi kristal
Salah satu litar berasaskan aplikasi yang menggunakan motor stepper untuk berputar panel suria dijelaskan di bawah.
Kawalan Motor Stepper Menggunakan Mikrokontroler 8051 yang diprogramkan
Projek Solar Tracking Solar Panel bertujuan untuk menghasilkan jumlah tenaga maksimum dengan menyesuaikan panel suria secara automatik. Dalam projek ini, motor stepper yang dikendalikan oleh mikrokontroler keluarga 8051 yang diprogramkan dihubungkan ke panel suria untuk mengekalkan wajah panel suria yang selalu tegak lurus dengan matahari.

Kawalan Motor Stepper Menggunakan Mikrokontroler oleh Edgefxkits.com
The mikrokontroler yang diprogramkan menghasilkan denyutan elektrik bertahap secara berkala ke motor stepper untuk memutarkan panel solar. IC pemacu digunakan untuk menggerakkan motor stepper kerana pengawal tidak dapat memberikan keperluan kuasa motor.
Sila tinggalkan cadangan, maklum balas dan pertanyaan anda dengan menghantar komen di bahagian komen di bawah. Kami akan melakukan yang terbaik untuk membantu anda secara teknikal mengenai artikel ini dan membangunkan projek elektrik dan elektronik menggunakan motor stepper.