Di dunia moden, robot akan memainkan peranan penting . Tujuan utama robot adalah untuk mengurangkan kekuatan lelaki. Robot digunakan dalam elektronik dalam banyak aplikasi. Dalam artikel ini kita telah membincangkan tentang bagaimana membina robot dengan modul Arduino & mikrokontroler 8051. Untuk membina robot dengan Arduino, kami menerangkan mengenai robot arduino dengan penghindaran halangan. Komponen yang diperlukan merangkumi badan Robot, motor DC, sensor Ultrasonik, modul Arduino, IC pemandu Motor dan Modul Arduino
Bagaimana Membina Robot?
The komponen yang diperlukan untuk membina robot merangkumi perkara berikut
Badan Robot
Badan robot asas dari robot penghindaran halangan ditunjukkan dalam gambar berikut. Badan robot adalah badan plastik dan ia mengandungi roda di kedua sisi. Di hadapan badan robot sensor ultrasonik disusun. Dengan menggunakan sensor ultrasonik halangan dapat dikesan. Semasa robot bergerak, jika ada halangan yang dikesan oleh sensor ultrasonik maka robot akan bergerak ke samping dan ia akan terus bergerak.

Badan Robot
Motor DC
The Motor DC adalah motor elektrik dan ia menggunakan elektrik arus terus. Pengoperasian mana-mana motor elektrik berdasarkan elektromagnetisme. Medan magnet dihasilkan oleh konduktor pembawa arus ketika diletakkan di medan magnet luaran, ia akan mengalami daya yang berkadar dengan arus di konduktor. Secara amnya, kita tahu bahawa magnet adalah daya tarikan polaritas berlawanan dari utara ke selatan dan jika polariti sama seperti utara ke utara & selatan ke selatan maka magnet akan menghalau.

Motor DC
Konfigurasi dalaman motor DC dirancang untuk menghubungkan interaksi magnet antara konduktor pembawa arus dan medan magnet luaran untuk menghasilkan gerakan. Dalam ini kita menggunakan dua motor DC, setiap motor mengandungi 6v dan total dua motor DC mengandungi 12v. Dua motor DC diletakkan di badan robot yang dapat kita perhatikan pada gambar berikut. Badan robot digerakkan dengan bantuan motor DC

Badan Robot dengan Motor DC
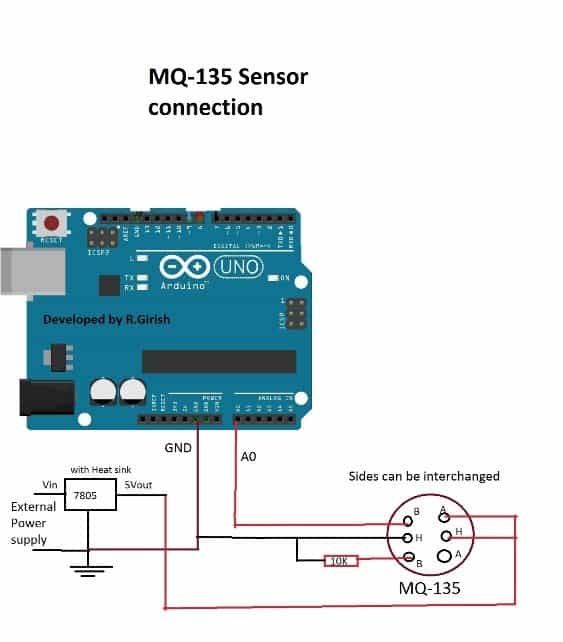
Modul Arduino
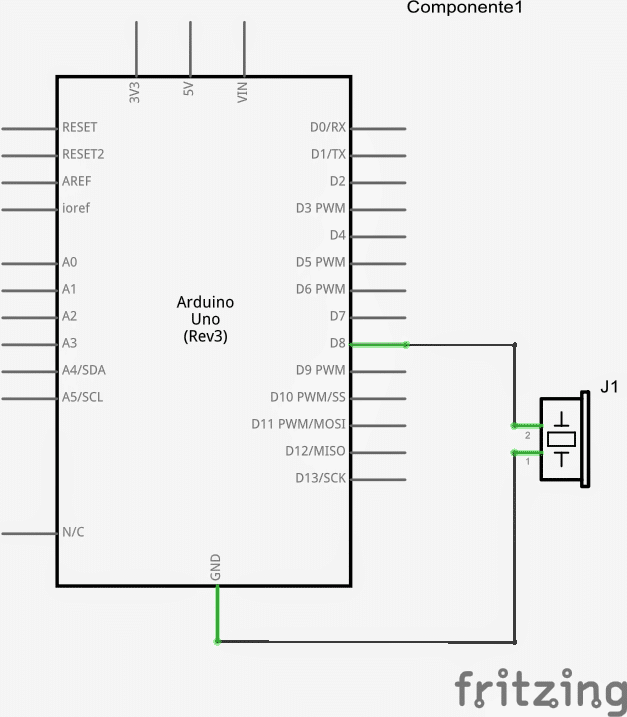
Gambar berikut menunjukkan gambar modul arduino. The modul arduino memainkan peranan penting dalam reka bentuk robot penghindaran halangan menggunakan kit arduino. Pin penerima arduino disambungkan ke pin kedua sensor ultrasonik dan pin arduino 1, 2, & 3 dihubungkan ke pemacu motor DC. Kapasitor dan diod komponen biasa juga disambungkan ke modul arduino dengan bantuan bekalan kuasa bateri.

Modul Arduino
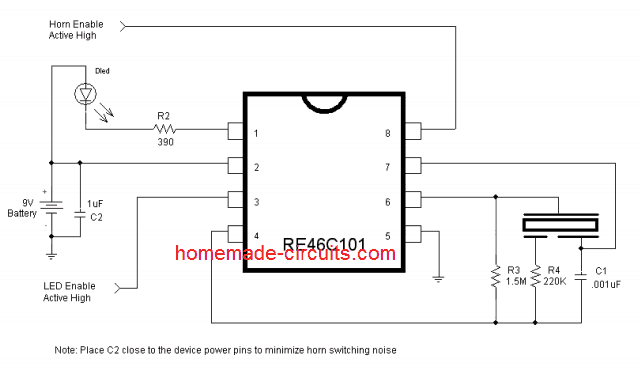
IC Pemandu Motor
Untuk menjalankan motor DC IC pemandu motor terpakai. Pin 3,6 & 11, 14 pemandu motor disambungkan ke motor DC. Pin input 1 dan 2 disambungkan ke modul arduino dan pin aktif disambungkan ke pin pemancar arduino. Pin 4, 5, 12, 13 pemandu motor disambungkan ke tanah.

IC Pemandu Motor
Sensor Ultrasonik
Dalam konsep ini sensor ultrasonik digunakan untuk mengesan halangan di hadapan dan ia akan menghantar arahan ke papan arduino. Bergantung pada isyarat input mikrokontroler mengarahkan robot untuk bergerak ke arah yang bersilih ganti.

Sensor Ultrasonik
Aplikasi penghindaran halangan robot arduino
- Robot arduino boleh bergerak di permukaan mana pun
- Ia boleh bergerak di permukaan logam seperti badan peti sejuk.
Gambar di bawah menunjukkan robot arduino untuk mengelakkan halangan

Robot Arduino untuk Menghindari Halangan
Untuk membina robot dengan pengawal mikro 8051 kami menerangkan mengenai kenderaan robot pengesan logam. Komponen yang diperlukan untuk membina robot dengan mikrokontroler 8051 adalah
- 8051 mikrokontroler
- Motor DC
- Pemandu motor
- Pengesan logam
- Penyahkod
- Pengekod
- Tekan butang
- Kristal
- Pemancar dan penerima RF
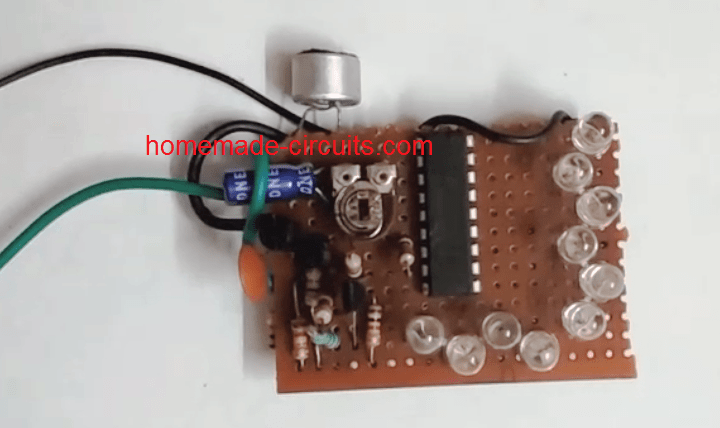
Pengesan logam
The Pengesan logam adalah gegelung yang mempunyai satu atau lebih gegelung logam yang digunakan untuk mengesan logam di tanah. Pengesan logam berfungsi berdasarkan prinsip aruhan elektromagnetik. Pengesan logam disambungkan ke badan robot melalui PCB yang dapat kita perhatikan pada gambar terakhir. Gambar berikut menunjukkan pengesan logam umum yang digunakan dalam projek elektronik.

Pengesan logam
Butang Tekan
Butang tekan adalah butang yang terdiri daripada logam keras seperti plastik dan logam. Secara amnya butang tekan digunakan untuk menetapkan semula program di mikrokontroler. Gambar berikut menunjukkan gambar butang tekan.

Tekan butang
8051 Pengawal Mikro
The 8051 mikrokontroler terdiri daripada 40 pin . Pin ke-4 & ke-5 mikrokontroler disambungkan ke pengayun kristal. Pin Vcc diberikan kepada bekalan kuasa 5V dan pin ground disambungkan ke tanah. Pin 15, 16, 18, 19 mikrokontroler disambungkan ke IC pengekod HT12E. Pin mikrokontroler 2, 7, 8, 9, disambungkan ke butang tekan.
Gambar berikut setelah menyambungkan semua komponen seperti perintang, kapasitor, pengayun kristal, mikrokontroler siri 8051, pengekod dan lain-lain dihidupkan papan litar bercetak .

Sambungan PCB
Gambar di bawah menunjukkan robot pengesan logam dengan mikrokontroler siri 8051.

Robot Pengesan Logam dengan Mikrokontroler Seri 8051
Dalam artikel ini kita telah membincangkan mengenai Cara membina robot dengan mikrokontroler arduino dan 8051 . Saya harap dengan membaca artikel ini, anda telah memperoleh beberapa pengetahuan asas untuk membina robot. Sekiranya anda mempunyai pertanyaan mengenai artikel ini atau mengenai elektronik dan projek komunikasi , sila komen di bahagian bawah. Inilah soalan untuk anda, Apakah mikrokontroler siri 8051?
.